
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 机器人故障诊断 > 什么是工业机器人的工具中心点(TCP)
什么是工业机器人的工具中心点(TCP)
时间:2019-09-12 点击: 来源:互联网 作者:匿名
简介:工业现场的机器人实际上是有多个轴的机械手臂。要想让机器人完成指定的生产任务,通常需要在机器人的末端固定一个工具,比如焊接机器人的焊枪、涂胶机器人的胶枪、搬运机器人的夹具等。由于各工具的大……
工业现场的机器人实际上是有多个轴的机械手臂。要想让机器人完成指定的生产任务,通常需要在机器人的末端固定一个工具,比如焊接机器人的焊枪、涂胶机器人的胶枪、搬运机器人的夹具等。由于各工具的大小、形状各不相同,这样就产生一个问题:如何选择一个点来代表整个工具呢?以下小编就来讲解下:机器人的工具中心点。
“工具中心点”的英文名称为“Tool Central Point”,简写为“TCP”。初始状态的工具中心点(TCP)是工具坐标系(Tool Coordinate System)的原点。当我们以手动(Jogging)或者编程(Programming)的方式让机器人去接近空间的某一点时,其本质是让工具中心点去接近该点。因此可以说机器人的轨迹运动,就是工具中心点(TCP)的运动。
同一个机器人可以因为挂载不同的工具,而有不同的工具中心点;但是同一时刻,机器人只能处理一个工具中心点。比如,使用不同尺寸的焊枪,其枪口的位置肯定是不同的;但我们一次只能用一把焊枪,不能同时用两个。
工具中心点(TCP)有两种基本类型:移动式工具中心点(Moving TCP)和静态工具中心点(Stationary TCP)。
移动式工具中心点(Moving TCP)比较常见,它的特点是会随着机器人手臂的运动而运动。比如焊接机器人的焊枪、搬运机器人的夹具等。
静态工具中心点(Stationary TCP)是以机器人本体以外的某个点作为中心点,机器人携带工件围绕该点做轨迹运动。比如在某些涂胶工艺中,胶枪喷嘴是固定的,机器人抓取玻璃围绕胶枪喷嘴做轨迹运动,该胶枪喷嘴就是静态工具中心点。
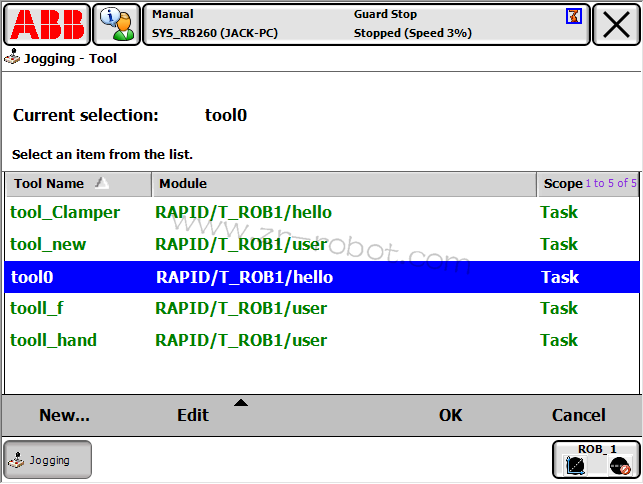
机器人调试时首先要设置工具数据(Tool Data),其内容包括设置工具中心点(TCP)、工具的重量和重心。ABB机器人在出厂时有一个默认的工具数据(tool0),tool0定义的TCP在机器人第六轴法兰盘的中心处(以六轴机器人为例)。在实际生产时要根据安装工具的不同,定义不同工具数据。比如下面这张图就有五个不同的工具数据(Tool Data)。
机器人的工具一般可以分为两大类:夹具类和枪类。
对于夹具类,其工具中心点一般可以tool0的TCP为基准,向外延伸一段距离来确定;而对于枪类(比如焊枪、胶枪等),则需要用四点法来确定工具中心点。
TAG:
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
上一篇:KUKA机器人命令中有句法错误
工业机器人维修相关阅读:
扫二维码手机浏览
