-

-
-
-
-
-
-
-
-
-
-
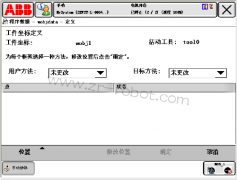
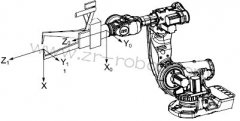
ABB机器人编辑工具定义步骤
操作 1. 输入工具中心点位置的笛卡尔坐标。 实例: tframe.trans.x tframe.trans.y tframe.trans.z [ 毫米]...
2017-03-25
-


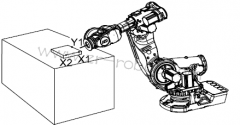
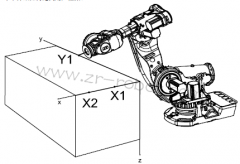

操作 1. 输入工具中心点位置的笛卡尔坐标。 实例: tframe.trans.x tframe.trans.y tframe.trans.z [ 毫米]...
2017-03-25

手机扫一扫添加微信