
这里介绍如何定义用户框架。
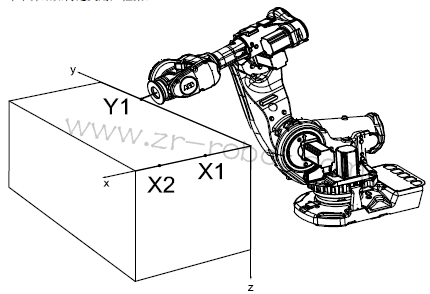
x 轴将通过点 X1-X2,y 轴通过 Y1。
x 轴将通过点 X1-X2,y 轴通过 Y1。
操作
1. 在 用户方法 弹出式菜单中,点击 3 点 弹出式菜单中,点击
2. 按下使动装置,将机器人移至您要定义的第一个点(X1、X2 或 Y1)。(X1 和 X2 之间的距离越大,定义就越精
确。)
3. 选择列表中的点。
4. 点击修改位置,定义此点。
5. 重复步骤 2 和 4,定义另外两个点。




