
定义工具中心点 TCP 的最简单方式通常是使用预定义方法,详情请参阅定义工具框页 148。如果您使用此方法,则无需写入任何 tframe 数值,因为此方法已提供这些数值。
如果您已具有工具的测量值,或出于某些原因想手动测量数值,则这些数值可以输入至工具数据中。
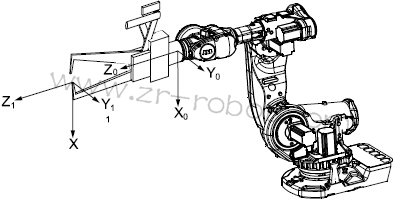
X 0 tool0 的 X 轴
Y 0 tool0 的 Y 轴
Z 0 tool0 的 Z 轴
X 1 待定义工具的X 轴
Y 1 待定义工具的Y 轴
Z 1 待定义工具的Z 轴
操作
1. 沿 tool0 的 X 轴,测量机器人安装法兰到工具中心点的距离。
2. 沿 tool0 的 Y 轴,测量机器人安装法兰到工具中心点的距离。
3. 沿 tool0 的 Z 轴,测量机器人安装法兰到工具中心点的距离。




