
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 机器人资讯 > 基于视觉的智能缺陷检测系统
基于视觉的智能缺陷检测系统
随着电子技术、图像传感技术和计算机技术的快速发展,利用基于机器视觉检测技术取代人工目视检测表面缺陷,已逐渐成为表面缺陷检测的重要手段,该方法具有自动化、非接触、速度快、精度高、稳定性高等优点。勃肯特已研发了基于机器视觉的智能缺陷检测系统。
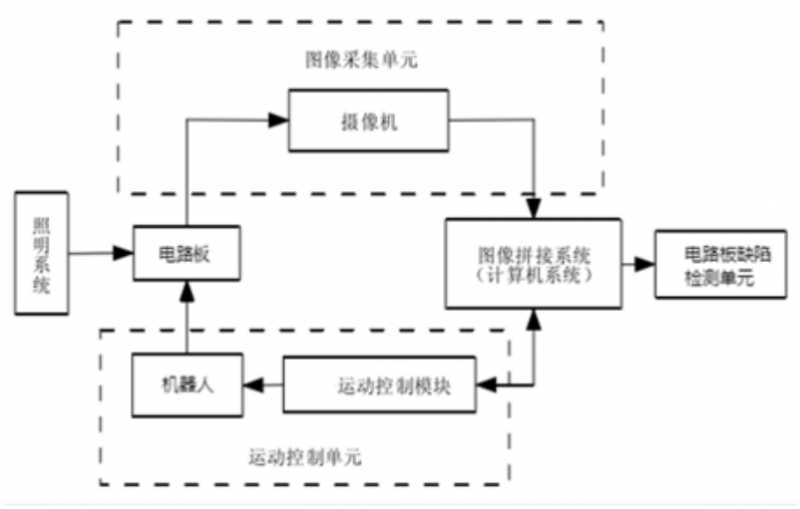
图1智能缺陷检测系统
一、目标图像处理
1.1标准图像采集
相机将摄入的图像模拟信号经图像采集卡数字化后送入计算机。

图2图像获取
1.2图像增强
1.2.1平滑滤波
采用领域平均法去除或衰减混杂在图像上的噪声的干扰,改善图像的质量。

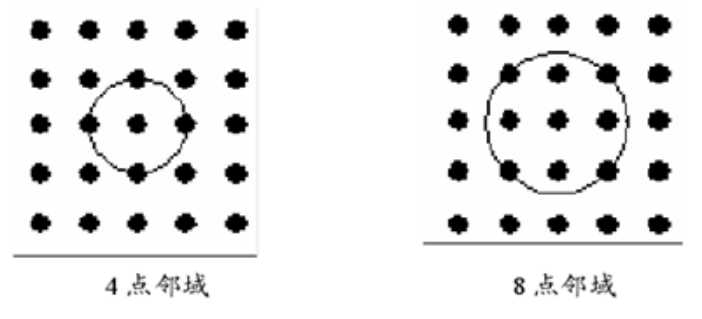
图3(j,k)点两种领域
1.2.2灰度拉伸
采用灰度拉伸的方法对目标图像进行图像增强处理,可以更加灵活的控制输出灰度直方图的分布,可以有选择的拉伸某段灰度区间以改善输出图像。

图4灰度拉伸变换函数
1.3图像分割
采用最大类间方差法,依据灰度直方图,实现图像分割,不易受噪声影响。
二、图像匹配
依据检测的物体,把所有缺陷进行分类识别,建立缺陷模板匹配数据库。当实时检测物体时,调取数据库,输出检测结果,发信号给机器人,提高缺陷检测精度。
2.1形状特征提取
采用 Hough 变换分别对提取的孔进行圆形检测,初步计算出孔在图像中的像素级圆心坐标,再利用切线信息对孔进行亚象素边缘检测来进一步提高孔的圆心精度。
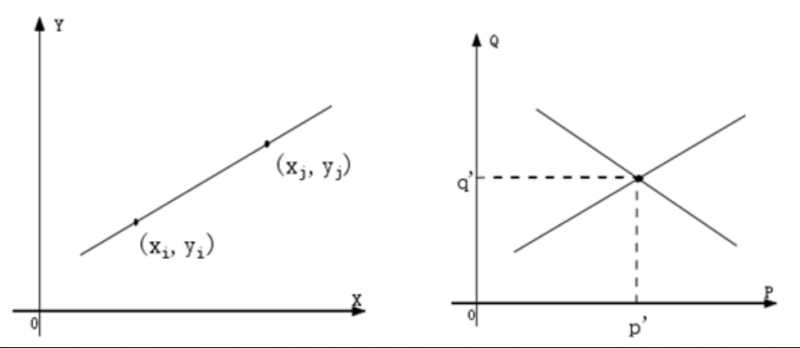
图5图像空间和参数空间中点和线的对偶性
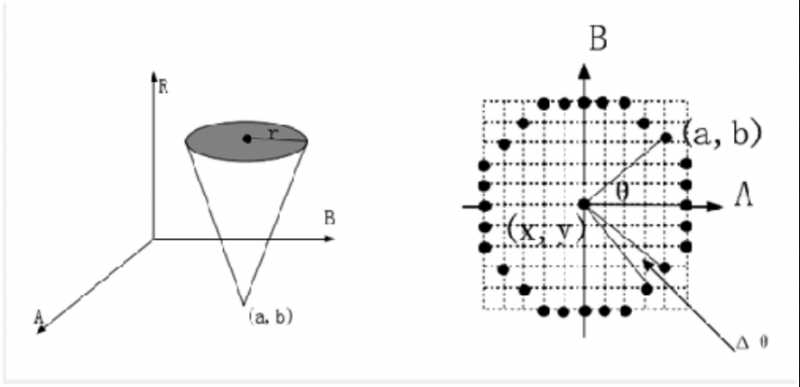
图6圆检测中梯度信息的利用
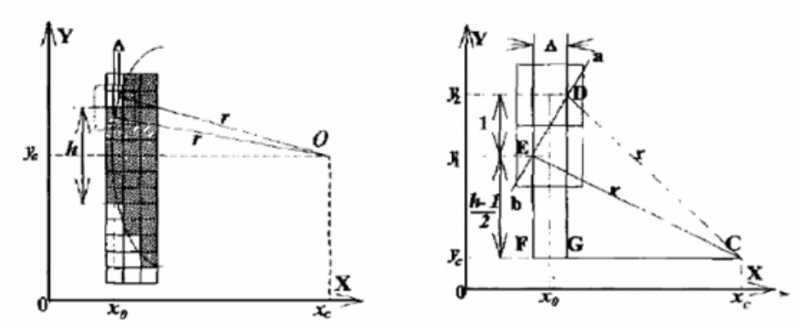
图7亚像素边缘检测
2.2多尺度形态学图像边缘提取
采用小波分解的方法分解检测对象,分别得到图像数据的高、低频子图像,利用多尺度形态学对低频子图像进行边缘检测,采用小波变换进行高频子图像边缘检测,将二者边缘检测结果融合,得到最后的清晰图像。
在产品生产制造过程中,由于生产环境不理想、制造工艺不规范等各种技术原因,产品表面难免会产生多种缺陷,如印制电路板上出现错孔、划伤、断路、短路和污染,液晶面板的基板玻璃和滤光片表面含有针孔、划痕、颗粒,带钢表面产生裂纹、辊印、孔洞和麻点,铁路钢轨出现凹坑、鼓包、划痕擦伤、色斑和锈蚀,这些缺陷不仅影响产品外观,更重要的是影响产品性能,严重时甚至危害生命安全,对用户造成巨大经济损失。
