
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 工业机器人维修 > ABB机器人 > ABB机器人维修故障代码―碰撞检测
ABB机器人维修故障代码―碰撞检测
时间:2024-11-19 点击: 来源:互联网 作者:匿名
简介:在日常ABB机器人维修工作中,碰撞事故可谓是屡见不鲜的问题之一。这些碰撞事故不仅可能导致机器人的结构受到损伤、精度有所下降,甚至还可能引发停机等严重后果。……
在正式启动机器人的生产运行流程之前,有一个至关重要的操作步骤是绝对不能忽视的!
不然,你极有可能会遭遇到类似下面这张图片所展示的情景:
ABB机器人维修故障代码显示着:10024(碰撞事件)
详细情况说明如下:
这是机械手的某个具体机械部件与固定设备的某个组成部分不慎发生了接触碰撞。
具体发生了什么故障呢?
机械手原本顺畅的运动流程被瞬间打断,并且立即停止了正在执行的程序指令。
在碰撞事件发生后,又该如何对机器人进行移动操作呢?
· 机器人一旦遭遇碰撞等意外情况,会立即报告运动监控等相关错误。
· 应该如何进行移动操作呢?
· 你需要通过示教器进入控制面板的监控界面,然后尝试将手动操纵监控功能暂时关闭。但请注意,如果机器人并未配置collision detection(碰撞检测)选项,你将无法在此处关闭监控功能。
· 在尝试移动机器人时,你可能会遇到机器人仍然处于卡死状态或者移动速度过快而导致继续报告碰撞错误的情况。
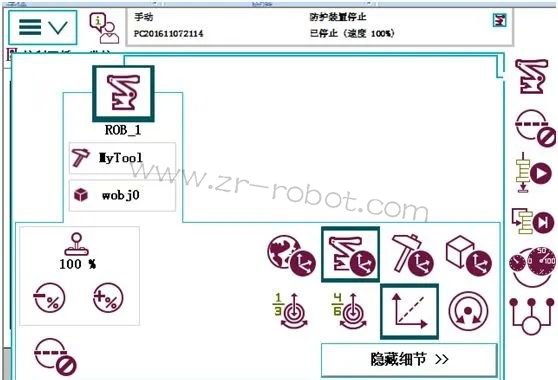
· 你需要点击示教器右下角的快速设置按钮,然后选择第一行显示的机器人图标,并点击显示详情。在详情界面中,你需要找到摇杆设定速度,并将速度百分比调整至大约10%(这里所指的是手动摇杆的速度,而快速设置中的倒数第二个速度则代表程序运行速度)。接下来,你需要以缓慢而谨慎的方式移动机器人。
在日常ABB机器人维修工作中,碰撞事故可谓是屡见不鲜的问题之一。这些碰撞事故不仅可能导致机器人的结构受到损伤、精度有所下降,甚至还可能引发停机等严重后果。根据我所搜集到的信息,在ABB机器人维修过程中常见的碰撞事故主要可以归结为以下几种类型:
· 编程错误所引发的碰撞:当操作员在编写或调整机器人的程序时,可能会因为计算失误或输入了错误的坐标值,从而使得机器人在移动过程中与其他设备或工作区域内的障碍物发生不必要的碰撞。
· ABB机器人维修机械故障所导致的碰撞:机器人的关节、轴承或驱动系统等关键部件一旦出现故障,可能会导致其运动状态出现异常。这种机械故障可能会使机器人在运行过程中突然停止运动或偏离预定的运动轨迹,从而引发碰撞事故。
· 人为操作失误所造成的碰撞:维修人员在检查、维护或操作机器人时,可能会因为注意力不集中或缺乏足够的经验而导致误操作,从而触发碰撞事故。
· 外部因素所诱发的碰撞:机器人所处的工作环境如果存在振动、冲击或电磁干扰等外部因素,可能会导致其控制系统响应异常,从而引发了碰撞事故。
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
工业机器人维修相关阅读:
扫二维码手机浏览
