在作保养和修理工作之前必须关闭机器人系统,为了防止未经许可的重新开机,要用一个挂锁锁...
2017-01-18
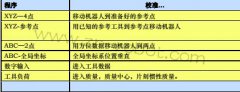
用4-点方法,工具将按照它的工具中心点从4个不同方向移动到参考点。[因此 叫4-点方法]。 然后在不同的法兰...
工具子菜单包括下列子程序。 每个这种检测程序,都配有通过对话来对相应的程序进行引导的表格。 一、定位的...
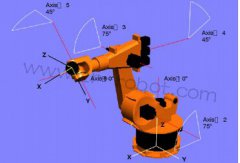
每个轴可旋转角度的度数不变的,KUKA机器人每个轴的装配称为分解。加上了解KUKA机器人各轴 之间的距离,操...
1、KUKA机器人检测概述 使用预先确定的KUKA机器人标准程序帮助,你可以方便地用不同的方法得到下列尺寸。 ...
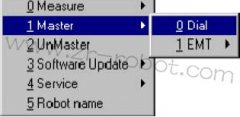
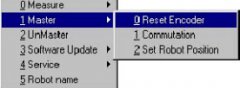
如果KUKA机器人的轴使用绝对编码器,这个轴可能需要参考点校正。下列校正类型是允许的。 如果轴不使用绝对...
如果KUKA机器人系统包含附加的位置KUKA机器人校正控制/附加驱动,它们必须预先KUKA机器人校正。 如果适当的...
假如首次校正已经执行后,这个指令能用来校正KUKA KR3机器人。要做这些,选择指令重 置工具学习的数据。 这...
2017-01-17
KUKA KR3型号的机器人,执行校正仅仅使用游标尺;这些游标尺安装在各个轴上 KUKA KR3校正程序和校正菜单和K...
这个功能可能在校正数据丢失时恢复校正数据。KUKA机器人在手动前工具学习的数据不 需要学习时,能带一些工...
使用负荷校正功能时,必须带负荷执行。负荷校正两种用工具学习的数据和不用工 具学习的数据。 按顺序执行负...
如果首次校正后,机器人装上重的工具或工件,增加的负荷使工具学习的数据增加。 机器人必须重新校正,[正常...
手机扫一扫添加微信