
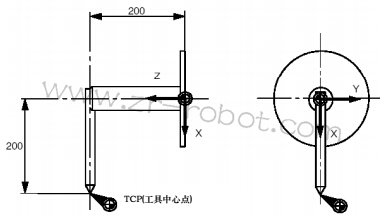
用从全局坐标系[点线]原点的距离,定义工作头中心点的位置。这个距离的说明由3个轴 X,Y和Z组成[虚线]。
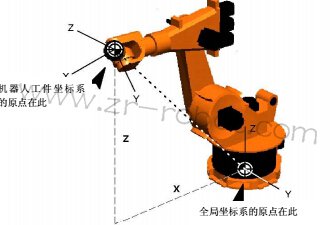
基本设置中,KUKA机器人坐标系和全局坐标系的原点重叠。
KUKA机器人工件坐标系的定位,原点在工件中心,用全局坐标系变化的补偿值定义。
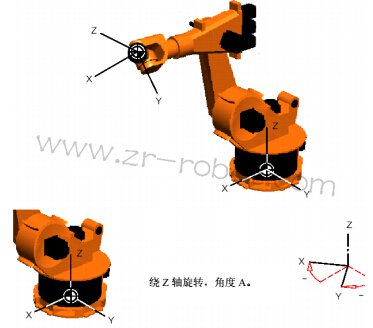

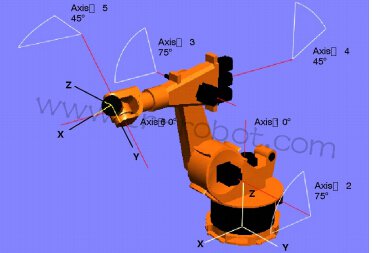
用坐标X,Y,Z,来说明表现一个点的空间信息,旋转角度A,B,C,称为框架结构。 基本设置中,KUKA机器人坐标的全局坐标系相互重叠。
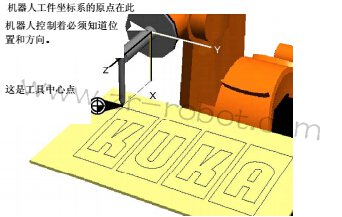
KUKA机器人工件头上工具或工件参考点位置是计算出来的,KUKA机器人操作者必须知道,在工作头 坐标系里它们的位置和方向有联系。
使用外部测量装置决定这些数据。任何时候控制KUKA机器人,所有已经记录的数据能调入。可 是冲撞后,这些数据不是长期有效的,必须重新决定。
另外获得工具数据的方法,是借助标准系统中测量刀具的方法和KUKA机器人的计算功能。
为了这个目的,KUKA机器人法兰上的工具或工件从不同的方向移动到某个参考点。这个参考点 可以位于KUKA机器人工作空间内的任意的一个位置。
然后根据KUKA机器人法兰的不同位置和取向,可以计算出工具中心点的位置。

为了工具或工件能快速移动,而KUKA机器人驱动系统不超载,工具或工件的负荷也必须考虑。

为了这些目的,重量,重心点,工具惯性和工件的合成力矩必须考虑进去。 KUKA机器人上装好的附加负荷不能忽略。




