
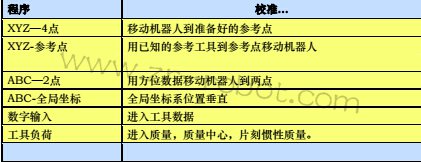
工具”子菜单包括下列子程序。
每个这种检测程序,都配有通过对话来对相应的程序进行引导的表格。
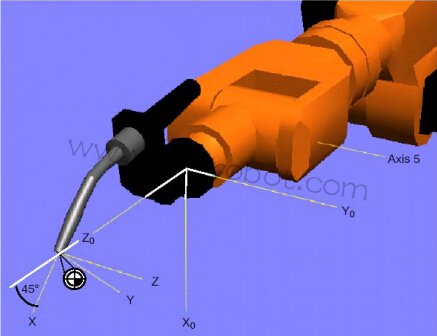
一、定位的方法
使用这些方法确定工具原点相对KUKA机器人法兰坐标系原点的位置。 这些方法包括校准程序“XYZ-4点”[参见2.2.2],和“XYZ-参考”[参见2.2.3]
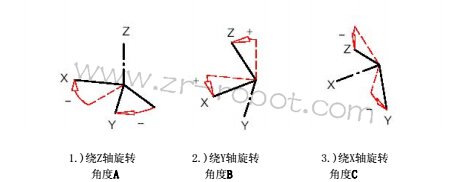
二、定向的方法
使用这些方法,可以确定全局坐标系相对KUKA机器人法兰坐标系的转动关系。[ABC依照Z-Y-X角 度]。这些方法包括校准程序“ABC-2点”[参见2.2.4],和“XYZ-全局”[参见2.2.5]。
1、ABC-2点
如果在定位和导向时需要三根工具轴的准确取向时,使用这个方法。它要求画出的点在 XY平面的正面,并且在工具X轴的负方向。
2、ABC-全局(5D)
这个方法仅使用在只需要工具的工作方向用来工作和导向时。
3、ABC-全局(6D)
如果3个工具轴的取向都必需用于定位和导向时,使用这个方法。
4、工具定向的方法
如果知道工具的尺寸和角度位置。通过菜单“数字输入”输入。[参见2.2.6]




