
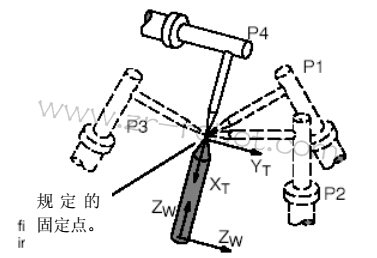
用“4-点”方法,工具将按照它的工具中心点从4个不同方向移动到参考点。[因此 叫“4-点”方法]。

然后在不同的法兰位置和角度,计算出来工具中心点位置。
执行
KUKA机器人法兰上安装待测工具,找出一个合适的参考点。它可以是固定在工作空间的参考的顶尖或者是某工件或者装置的某简单明了的角。
使用菜单键”开机运行”[在显示屏的上部],打开菜单“调节”[“校准”]和“工具”,在这儿选择KUKA机器人子菜单“XYZ-4点”。

4-点检测对话窗口打开:
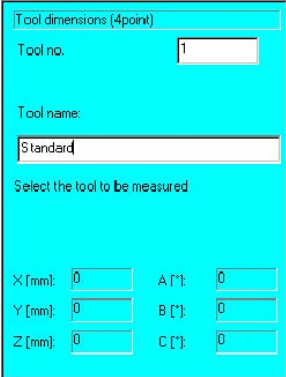
使用KUKA机器人状态键[在显示屏底部的右边],用+/-键选择想要的工具号。16个不同工具的全部标 准数据存储在此。在窗口的底部显示工具当前的尺寸或角度。

你能用箭头键从工具名输入条进入,为工具输入名字。
按下KUKA机器人软键具准备好”[在显示屏底咅卩],按顿序校准选择的工具。自动打开下一个窗口
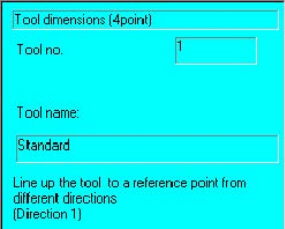
现在提示你使工具从不同的方向对准某个参考点。为此,任意KUKA机器人轴移动键或鼠标都可以使用。
现在按顺序执行下列步骤。
1、设置需要的工具取向。
2、移动工具中心点到参考点。
如果选择的点太接近,将产&错误信息。你现在可以按下软键“重:复”到最后的校准重做,或按软键“重复全部”到重复全部校准。
控制部分接受移动经过的点后,将提示从另外一个方向驶近到参考的工具中心位置。重复 这些步骤直到从四个方向移动找到此参考点并且给定此参考点坐标参数。
设置需要的KUKA机器人工具取向。
移动工具中心点到参考点。
当工具中心点位于正确的参考点时,按下软键“点正确”保存它的位置。




