
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 喷涂机器人维修 > fanuc机器人手动示教机器人
fanuc机器人手动示教机器人
时间:2016-12-12 点击: 来源:互联网 作者:匿名
简介:1.示教模式(见表1,图1) 表1 关节坐标示教(Joint) 通过TP上相应的键转动机器人的各个轴示教 直角坐标示教(XYZ) 沿着笛卡儿坐标系的轴直线移动机器人,分两种坐标系: 1)通用坐标系(World):机器人缺省的坐标系 2)用户坐标系(User):用户自定义的……
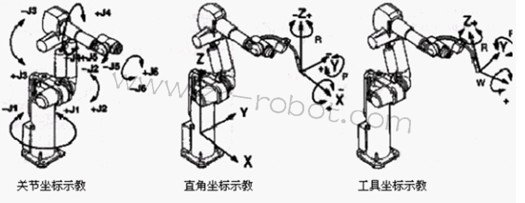
1.示教模式(见表1,图1)
表1
关节坐标示教(Joint) 通过TP上相应的键转动机器人的各个轴示教
直角坐标示教(XYZ) 沿着笛卡儿坐标系的轴直线移动机器人,分两种坐标系:
1)通用坐标系(World):机器人缺省的坐标系
2)用户坐标系(User):用户自定义的坐标系
工具坐标示教(Tool) 沿着当前工具坐标系直线移动机器人。工具坐标系是匹配在工具方向上的笛卡儿坐标系
设置示教模式,按TP上的COORD键进行选择。
屏幕显示 JOINT→JOG→TOOL→USER→JOINT
状态指示灯 JOINT→XYZ→TOOL→XYZ→JOINT
2.设置示教速度
按TP上的示教速度键进行设置。
示教速度键 VFINE→FINE→1%→5%→50%→100%
VFINE到5%之间,每按一下,改变1%
5%到100%之间,每按一下,改变5%
SHIFT键+示教速度键 VFINE→FINE→1%→5%→50%→100%
注意:开始的时候,示教速度尽可能的低一些,高速度示教,有可能带来危险。
3.示教
(1)按下Deadman 开关,将TP开关置于ON
(2)按下SHIFT键的同时,按示教键开始机器人示教。SHIFT键和示教键的任何一个松开,机器人就会停止运动。
注意:示教机器人人前,请确认工作区域内没有人。
表1
关节坐标示教(Joint) 通过TP上相应的键转动机器人的各个轴示教
直角坐标示教(XYZ) 沿着笛卡儿坐标系的轴直线移动机器人,分两种坐标系:
1)通用坐标系(World):机器人缺省的坐标系
2)用户坐标系(User):用户自定义的坐标系
工具坐标示教(Tool) 沿着当前工具坐标系直线移动机器人。工具坐标系是匹配在工具方向上的笛卡儿坐标系
设置示教模式,按TP上的COORD键进行选择。
屏幕显示 JOINT→JOG→TOOL→USER→JOINT
状态指示灯 JOINT→XYZ→TOOL→XYZ→JOINT
2.设置示教速度
按TP上的示教速度键进行设置。
示教速度键 VFINE→FINE→1%→5%→50%→100%
VFINE到5%之间,每按一下,改变1%
5%到100%之间,每按一下,改变5%
SHIFT键+示教速度键 VFINE→FINE→1%→5%→50%→100%
注意:开始的时候,示教速度尽可能的低一些,高速度示教,有可能带来危险。
3.示教
(1)按下Deadman 开关,将TP开关置于ON
(2)按下SHIFT键的同时,按示教键开始机器人示教。SHIFT键和示教键的任何一个松开,机器人就会停止运动。
注意:示教机器人人前,请确认工作区域内没有人。
TAG:
FANUC
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
上一篇:伺服电机的结构和工作特点
下一篇:焊接机器人组成结构
工业机器人维修相关阅读:
扫二维码手机浏览
