-

专业FANUC机器人A05B-2316-C105 维修
A05B-2316-C105 FANUC机器人维修 A05B-2316-C105 FANUC机器人维修 供应A05B-2316-C105、发那科机器人示教器...
2017-05-27
-
专业KUKA KSP 600-3X64 00-198-269维修
KSP 600-3X64 00-198-269维修 KSP 600-3X64 00-198-269维修 名称:库卡C4机器人驱动 型号:KSP 600 3X64 订...
2017-05-11
-
-
-
ABB机器人要运行4点 XZ 校准入操作?
操作参考信息 1. 在 ABB 。 校准 更改参照点。 基座 菜单,然后点击 2. 点击 4 点 XZ 。然后选择机器人驱动...
2017-04-27
-
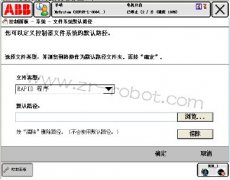
ABB机器人在创建备件时如何删除存储于SMB 内存或控制器内存中的数据?
删除SMB 数据 本节介绍在创建备件时如何删除存储于SMB 内存或控制器内存中的数据。 操作 1. 在 ABB 。 校准...
2017-04-27
-
ABB机器人如何从控制器更新串行测量电路板上的数据?
更新 SMB 内存中的数据 本节说明如何从控制器更新串行测量电路板上的数据。 这是通过 RobotStudio 或使用 F...
2017-04-26
-
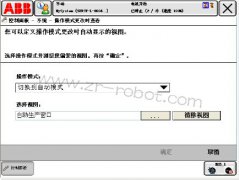
ABB机器人要将串行测量电路板数据加载到控制器怎么操作?
通过SMB 内存更新控制器数据 本文介绍如何将串行测量电路板数据加载 到 控制器。 操作参考信息 1. 在 ABB ...
2017-04-26
-
ABB机器人如何查看串行测量电路板和控制器中的数据状态?
查看SMB 数据状态 本文介绍机器人驱动器如何查看串行测量电路板和控制器中的数据状态。 操作 1. 在 ABB 菜...
2017-04-26
-
-
-
ABB机器人如何使用FlexPendant 加载校准数据?
概述 本节介绍如何使用FlexPendant 加载校准数据。 校准数据通常存储在各ABB机器人的串行测量板上,机器人...
2017-04-26