
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:首页 > 机器人资讯 > 机器人维修|KUKA机器人摆动焊接技术
机器人维修|KUKA机器人摆动焊接技术
时间:2025-01-06 点击: 来源:互联网 作者:匿名
简介:在具体的焊接作业中,KUKA机器人会根据事先设定的摆动轨迹与参数,精确地控制焊枪进行有序的摆动。与此同时,一系列外部传感器会实时地监测焊接的当前状态,如焊缝的精准跟踪、熔池的细致监控等,这些监测数据将作为反馈,进一步确保焊接过程的绝对稳定性与精……
摆动焊接是一种创新的焊接方式,它巧妙地模拟了人工焊接时的摆动动作,旨在显著提升焊接作业的质量与效率。在先进的KUKA机器人焊接系统中,摆动焊接技术更是得到了广泛的推广与深入的发展。该技术借助精密预设的摆动轨迹与各项参数,引导工业机器人在焊接作业中执行规律且精准的摆动,从而确保焊缝能够得到均匀的加热与完美的塑形,进而达到提升焊接质量的显著效果。
工作原理
KUKA机器人摆动焊接的核心工作原理,主要依托于其前沿的控制系统与传感器技术。通过高度集成的控制系统、运动控制技术、焊接机器人控制技术以及精密的执行器,KUKA机器人维修能够执行出高精度、高速度且高度稳定的摆动焊接操作。
在具体的焊接作业中,KUKA机器人会根据事先设定的摆动轨迹与参数,精确地控制焊枪进行有序的摆动。与此同时,一系列外部传感器会实时地监测焊接的当前状态,如焊缝的精准跟踪、熔池的细致监控等,这些监测数据将作为反馈,进一步确保焊接过程的绝对稳定性与精准度。除此之外,KUKA机器人还配备了先进的电源控制技术,能够依据焊接的实际需求,精确地调节电流、电压等关键参数,从而满足各种复杂焊接工艺的具体要求。
参数设置
在库卡机器人维修焊接系统中,摆动焊接参数的设置对于最终的焊接质量与作业效率具有决定性的影响。用户可以根据焊接作业的实际需求,灵活地选择合适的摆动类型,并细致地设置相应的摆长、摆幅以及摆动频率等关键参数。
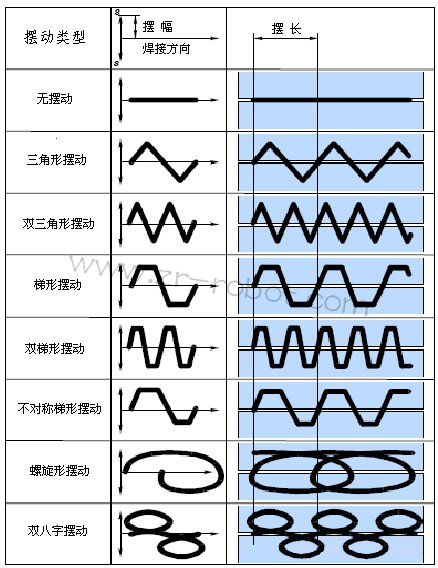
摆动类型:KUKA机器人维修提供了多种摆动类型供用户选择,如简洁的无摆动、稳定的三角形摆动、高效的双三角形摆动、灵活的梯形摆动、多变的双梯形摆动、独特的不对称梯形摆动以及复杂的双八字摆动等。用户可以根据焊缝的具体形状与尺寸,精心挑选最为合适的摆动类型。
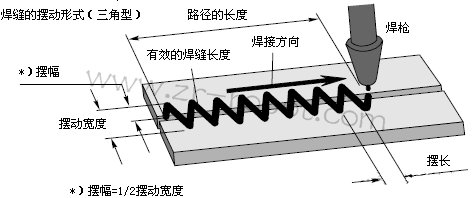
摆长:摆长是指焊枪在摆动过程中,从一个极限位置移动到另一个极限位置所经过的距离。在设置摆长时,用户需要综合考虑焊缝的长度与宽度,以确保焊缝能够得到充分的加热与均匀的塑形。
摆幅:摆幅则代表着焊枪在摆动过程中,相对于中心位置的最大偏移量。在设置摆幅时,用户需要细致考虑焊缝的宽度与深度,以确保焊缝能够得到良好的填充效果与出色的外观质量。
摆动频率:摆动频率是指焊枪在单位时间内完成摆动循环的次数。在设置摆动频率时,用户需要权衡焊接速度与焊缝的质量要求,以确保焊接过程的稳定性与作业的高效性。
免责声明:本网部分文章和信息来源于互联网,本网转载出于传递更多信息和学习之目的。如转载稿涉及版权等问题,请立即联系网站所有人,我们会予以更改或删除相关文章,保证您的权利。
下一篇:工业机器人的需求迅猛增长
工业机器人维修相关阅读:
扫二维码手机浏览
