
工具坐标系
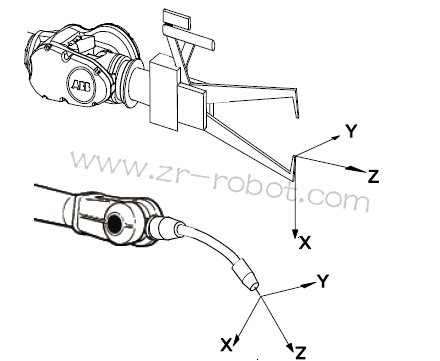
工具坐标系将工具中心点设为零位。 它机器人驱动器会由此定义工具的位置和方向。 工具坐标系经常被缩写为 TCPF (Tool Center Point Frame),而工具坐标系中心缩写为 TCPTool Center Point)。
执行程序时,ABB机器人就是将 TCP 移至编程位置。这意味着,如果您要更改工具(以及工具坐标系),ABB机器人的移动将随之更改,以便新的 TCP 到达目标。
所有ABB机器人在手腕处都有一个预定义工具坐标系,该坐标系被称为tool0。 这样就能将一个或多个新工具坐标系定义为tool0 的偏移值。
微动控制ABB机器人时,如果您不想在移动时改变工具方向机器人驱动器(例如移动锯条时不使其弯曲),工具坐标系就显得非常有用。




