
工件坐标系
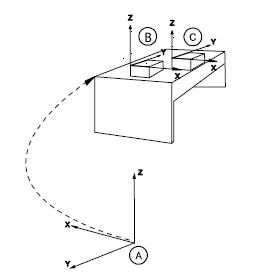
A 大地坐标系
B 工件坐标系 1
C 工件坐标系 2
工件坐标系对应工件:它定义工件相对于大地坐标系(或其它坐标系)的位置。
工件坐标系必须定义于两个框架:用户框架(与大地基座相关)和工件框架(与用户框架相关)。
您对ABB机器人进行编程时就是在工件坐标系中创建目标和路径。这带来很多优点:
1、 重新定位工作站中的工件时,您只需更改工件坐标系的位置,所有路径将即刻
随之更新。
2、 允许操作以外轴或传送导轨移动的工件,因为整个工件可连同其路径一起移动。




