主要的不同是:
1、使用轴 1、3 和 6。
2、因为使用轴 1,结果移动可能很巨大。
3、 未能识别全部负载参数。
轴 1 将从当前位置移动大约 +-23 度。 因此,在识别期间负载可移动一大段距离。对于 6 轴ABB机器人,轴 3 和 6 将移动。 轴 6 的配置角度与 6 轴ABB机器人的工作方式完全相同。
因为没有 6 个轴,4 轴ABB机器人无法识别负载的全部参数。 无法识别下面的参数:
1、I x - x 轴的惯性。
2、I y - y 轴的惯性。
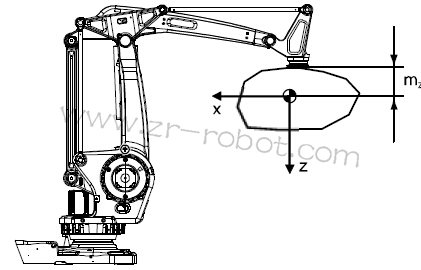
3、m z - 质心的 z 坐标。
但是,对于此类型的ABB机器人,机器人驱动器上面的参数对于控制性能的可忽略不计。 参见下图对负载坐标系的定义。