
可以通过软件变更轴动作范围的上限和下限。可以对所有轴变更设定。当fanuc机器人到达所设定的动作极限时,FANUC机器人停止运动。
变更步骤
1.按下MENU(菜单)键,显示出菜单画面。
2.按下“0 NEXT”(下一画面),选择“6 SYSTEM”(系统)。
3.按下F1“TYPE”(类型),显示出画面切换菜单。
4.选择“Axis Limits”(轴范围)。出现各轴可动范围设定画面。
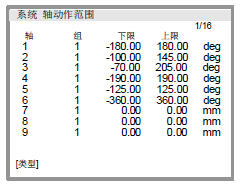
*设定值 0.000 表示FANUC机器人上没有该轴。
注意
改变 J1 轴的FANUC机器人可动范围时,请勿只通过软件来限制FANUC机器人的可动范围。应同时使用机械式制动器限制FANUC机器人的可动范围,以避免损坏周围设备或危及作业人员。这时,两者的可动范围应设定为相同的数值。
5.将光标对准于希望设定的轴范围处,使用示教操作盘的数字键输入新的设定值。
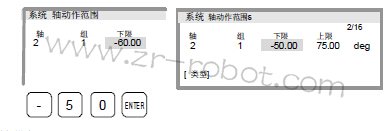
6.对所有轴进行设定。
7.要使已经设定的值有效,请暂时断开电源,在冷启动下重新通电。
注意
要使新的设定有效,必须重新接通控制装置的电源。若不这样做,FANUC机器人恐会执行预想不到的动作,由此造成人员受伤,设备受损。




