
KUKA机器人只在当为其设定的开行条件被满足时才运行。如果不再满足指定的外部条 件,此开行条件也可以使KUKA机器人有控制地停下来。
例如,此功能可用闭锁机器人,但也可以在出现故障时使KUKA机器人停止。
FBONL功能将在移动过程中被检测。所以,它还可以使KUKA机器人停在各点之间。
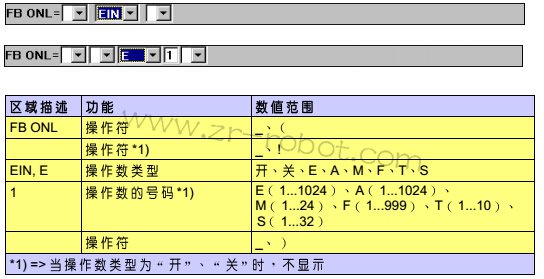
此功能以下列的句法为基础:

选定软键“ FBONL”,后,将打开下列InLine表格:
举例
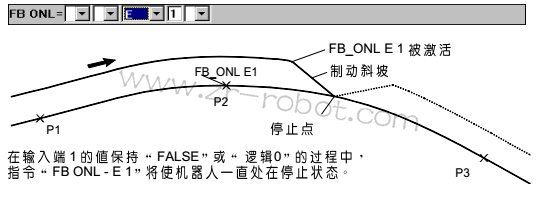
在向对FBONL編程设置过的点的移动过程中,FBONL处于激活状态。此激活状态一直延续到出现新的FB指令为止。
程序结束时FB指令将被复位。




