
图示
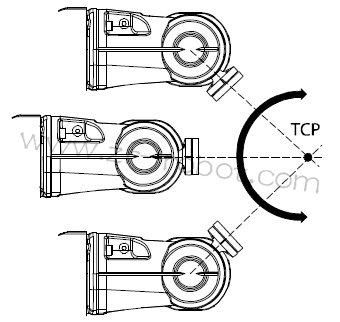
以下是围绕工具中心点 (TCP) 定义工具/操纵器机械腕方向的示意图。
说明
工具中心点 (TCP) 是定义所有ABB机器人定位的参照点。通常 TCP 定义为与操纵器转动盘上的位置相对。
TCP 可以微调或移动到预设目标位置。工具中心点也是工具机器人驱动器坐标系的原点。ABB机器人系统可处理若干 TCP 定义,但每次只能存在一个有效 TCP。
TCP 有两种基本类型:移动或静止。
移动TCP
多数应用中TCP 都是移动的,即TCP 会随操纵器在空间移动。典型的移动 TCP 可参照弧焊枪的顶端、点焊的中心或是手锥的末端等位置定义。
静止TCP
某些应用程序中使用固定 TCP,例如使用机器人驱动器固定的点焊枪时。 此时,TCP 要参照静止设备而不是移动的操纵器来定义。




