
如何执行工具框定义
本步骤介绍如何在笛卡尔坐标系中定义工具中心点
操作参考信息
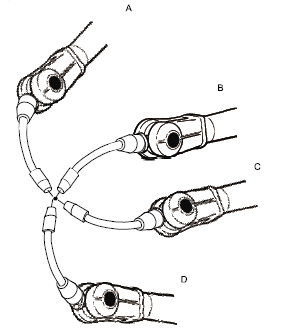
1. 将ABB机器人移至合适的位置 A,取得第一个接近点。(使用小幅增量,尽量将工具顶点的位置接近参照点。)
2. 点击修改位置,定义此点。
3. 重复步骤 1 和 2,定义其它的接近点,得到位置 B、C、D。(移动ABB机器人,使其远离固定大地坐标点,
以便获得最佳效果。 仅修改工具方向不会获得良好的效果。)
4. 如果您使用的方法是 TCP & Z 或TCP & Z, X,则还必须对方向进行定义。(遵循如何定义延伸器点 页 150 中的说明
进行操作)
5. 如果您出于某种原因希望恢复步骤 1-4 中所描述的校准步骤,请点击位置,然后点击全部重置。
6. 将所有点都定义好后,您可将它们保存到文件,以便以后重新使用。 在位置菜单中,点击保存。
7. 点击确定。 系统将立即显示计算结果对话框,要求您在将结果写入到控制器之前对其进行取消或确定。




