
准备工作
要定义工具框,首先需要在大地坐标系中建立一个参照点。如果要建立工具中心点定向,还需要在工具上附加延伸器。
您还需要决定用于工具框定义的方法。
可用方法
定义工具框时可使用三种不同的方法。 所有这三种方法都需要您定义工具中心点的笛卡尔坐标。 不同的方法对应不同的方向定义方式。
如何选择方法
本步骤介绍了如何选择用于定义工具框的方法。
操作
1. 在 ABB 菜单中,点击微动控制。
2. 点击工具,显示可用工具列表。
3. 选择想要定义的工具。
4. 在“ 编辑” 菜单中,点击定义…
5. 在出现的对话框中,选择要使用的方法
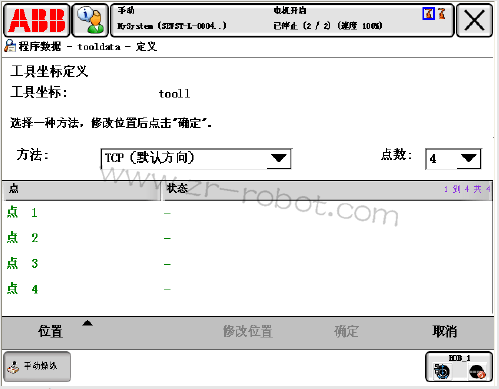
6. 选择要使用的接近点的点数。 通常 4 点就足够了。 如果您为了获得更精确的结果而选取了更多的点数,则应在定义每个接近点时均同样小心。
7. 有关如何收集位置和执行工具框定义的详情,请参阅如何执行工具框定义 页 149。




