外部 I/O 用来控制自动执行程序和生产。
1、fanuc机器人需求信号(RSR1-RSR4)选择和开始程序。当一个程序正在执行或中断,被选择的程序处于等待状态,一旦原先的程序停止,就开始运行被选择的程序。
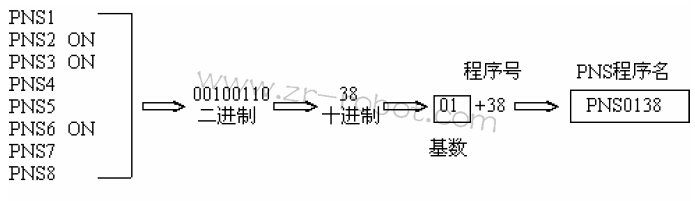
2、程序号码选择信号(PNS1-PNS8 和PNSTROBE)选择一个程序。当一个程序被中断或执行,这些信号被忽略。
3、自动开始操作信号((PROD_START)开始从第一行执行一个被选择的程序,当一个程序被中断或执行,这个信号不被接受。
4、循环停止信号(CSTOPI)停止当前执行的程序。
5、外部开始信号(START)重新开始当前中断的程序。为使远端控制器能自动开始程序的运行,以下条件需要被满足:
6、 TP 开关置于OFF
7、自动模式为 REMOTE
8、UI[3] *SFSPD 为ON
9、 UI[8] *ENBL 为ON
10、 系统变量$RMT_MASTER 为0(默认值是0)
注意:系统变量$RMT_MASTER 定义下列远端设备。
0:外围设备
1:显示器/键盘
2:主控计算机
3:无外围设备
PNS 程序名的例子(见图3)