
1、按下“MENU”键,选择“6 SYSTEM”。
2、通过画面切换选择“Master/Cal”。出现位置调整画面。
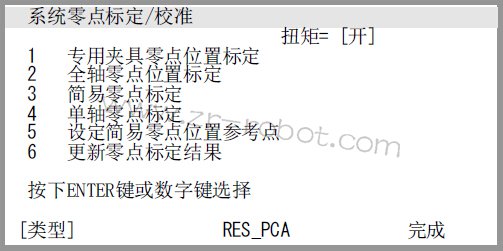
3、以点动(JOG)方式移动fanuc机器人,使其移动到零点位置标定的方法参考点。请在解除FANUC机器人制动器控制后进行操作。
4、选择“5 SET QUICK MASTER REF”(零点位置标定的方法参考点设定),按下F4“YES”。零点位置标定的方法参考点即被存储起来。
注意
由于机械性拆解和维修FANUC机器人而导致零点位置标定的方法数据丢失时,不能执行此操作。这种情况下,为恢复零点位置标定的方法数据而执行全轴零点位置标定或专用夹具零点位置标定。




