概要
启动系统涉及大量常用步骤,这些步骤与系统启动时所处的状态无关:
1、确保没有人员或阻碍物出现在ABB机器人或任何其它运动设备的工作区内。
2、打开 Control Module 上的主开关。
3、打开 Drive Module 上的主开关。在启动多个ABB机器人系统时,确保打开全部Drive Module 上的主开关。
4、要启动执行任何程序,必须按 Motors ON 按钮。
5、如有需要,在 FlexPendant 上按 Start、Step FORWARD 或 Step BACKWARD 按钮中的其中一个按钮来启动程序执行,如下图所示。
下面的图示显示不同的 FlexPendant 启动按钮:
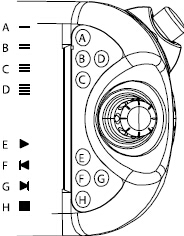
E 、START 按钮。 启动程序执行。在无“ 止- 动” 按钮的系统中, Start 按钮也可用于止动
功能。
F 、Step BACKWARD 按钮。 使程序后退一个指令。 如果系统不带抑?
Backward 按钮来执行止动功能。
G、Step FORWARD 按钮。 使程序前进一个指令。 如果系统不带抑? Forward 按钮来执行止动功能。
第一次启动
在 ABB 交付后第一次启动系统时,应按照文档 IRC5 与 RobotStudioOnline 入门中所述的步骤进行。如果在此步骤中遇到问题,请参阅启动故障 页 20。
启动生产系统
术语“ 生产系统” 是指:
1、较早投入使用的系统。
2、由程序员编写和测试的应用程序。
3、已经装配、连接和测试所有安全电路和设备。
在启动此类系统时,特别需要记住:
1、在启动任何工作单元之前务必研读任何特定的单元文档。工作ABB机器人单元安装较为复杂,操作时,要遵守许多规则和规章。
2、如果系统以 AUTO 模式启动,这就意味着外部控制器(如 PLC 或其它上级计算机)随时可以控制系统。反过来,ABB机器人随时都可执行意外运动,并可打开或闭合夹具。
3、可对可进行生产的系统进行编程,使它在启动时激活特定输出。这意味着,ABB机器人系统可激活所提工作单元中的任何其它机械或者与该ABB机器人系统连接到同一 LAN 中的任何其它工作单元。