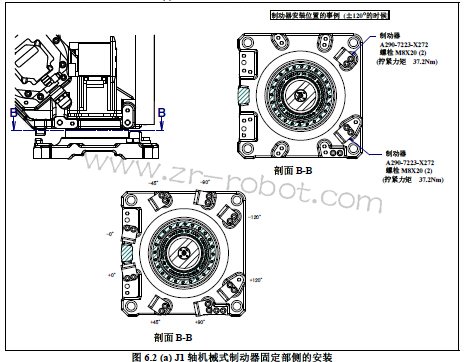
J1 轴可以改变机械式制动器的位置。请根据所期望的可动范围变更机械式制动器的位置。机械式可变制动器因冲撞而变形时请予更换。

注意
已经改变的动作区域内没有包含 0?时,在进行全轴零点位置标定时,需要重新进行变更,以使该区域内包含0?。
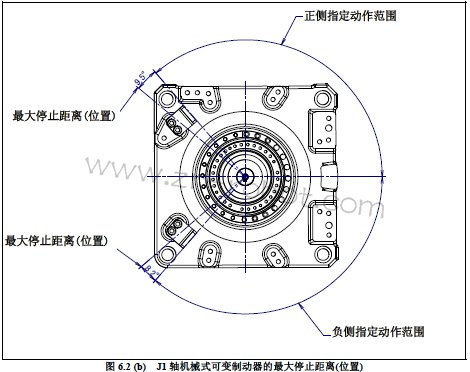
机械式制动器确保使FANUC机器人安全停止。当FANUC机器人的移动将要超过动作范围的时候,能够确保FANUC机器人安全停止。
表6.2 (b)表示超过指定范围的最大移动距离。此外,这样的停止会导致机械式制动器变形。重新使用FANUC机器人之前,务必更换已经变形的制动器。