
通过机器人编程可保证运动过程和流程将自动完成并始终可反复。为此,控制器需要大量的信息:
机器人位置 = 工具的空间位置
动作类型
速度 / 加速
等候条件、分支、相关性等信号信息
控制器使用哪种语言?
编程语言是 KRL - KUKA Robot Language (库卡机器人编程语言)
程序举例:
|
PTP P1 Vel=100% PDAT1
PTP P2 CONT Vel=100% PDAT2
WAIT FOR IN 10 'Part in Position'
PTP P3 Vel=100% PDAT3
|
KUKA 机器人如何编程?
KUKA 机器人可用不同的编程方法编程:
以示教 (Teach-in) 在法线编程。

图 1-10: 可利用库卡 smartPAD 进行机器人编程
图形辅助的互动编程: 模拟机器人过程
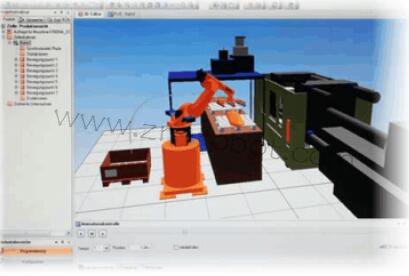
图 1-11: 用 KUKA WorkVisual 模拟
图 1-11: 用 KUKA WorkVisual 模拟
文字编程: 借助于 smartPAD 界面在上级操作 PC 上的显示编程(也适用于诊断、在线适配调整已运行的程序)
图 1-12: 用 KUKA OfficeLite 进行机器人编程




