
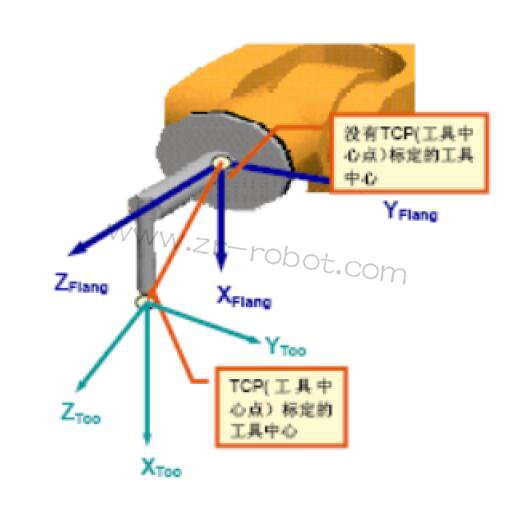
TCP( 工具中心点)标定
1 TCP 标定
怎么样进行TCP 标定呢?

工具获得一个用户定义的笛卡尔直角坐标系, 坐标系的原点在用户定义的参考点上。
TCP 标定的优势是什么呢?

2 TCP 标定的一般程序
第一步:
相对与法兰坐标系做有关TCP
(工具中心点)的计算;
第二步:
确定工具坐标系相对与法兰坐标系的旋转量
3 TCP(工具中心点)标定方法
3.1 TCP 定标法

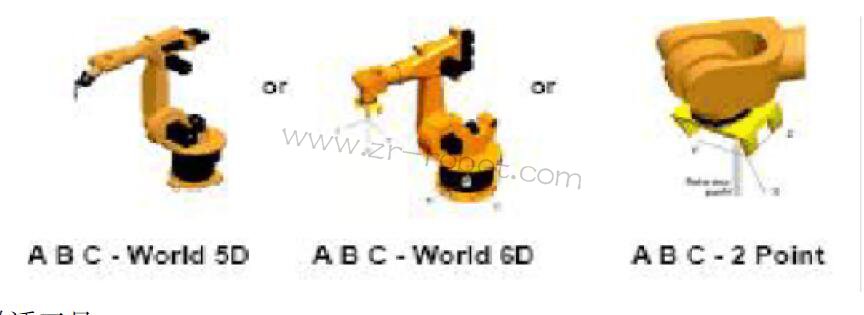
3.2 方位定标法
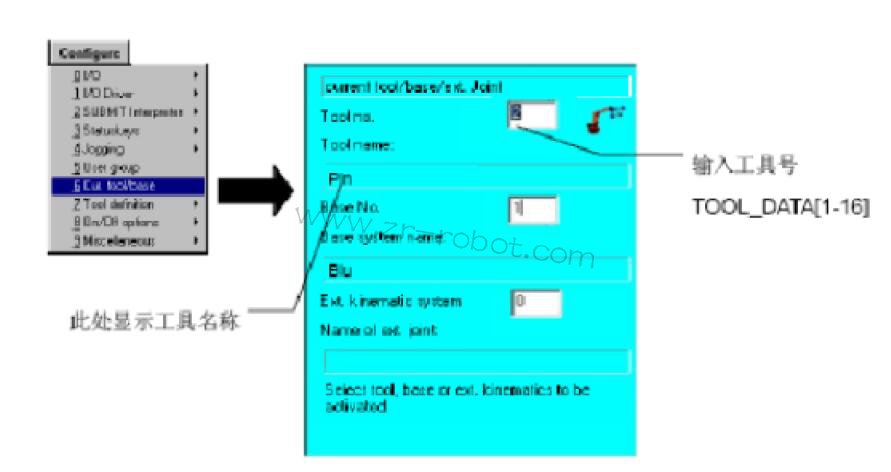
3.4 激活工具
3.5 X Y Z – 4 点法
3.5.1 X Y Z - 4 点法
在4 点法中,TCP(工具中心点)从4 个不同的方向靠近参考点。

然后从不同的法兰位置和角度计算出TCP 的位置。
3.5.2 X Y Z - 4 点法示意图
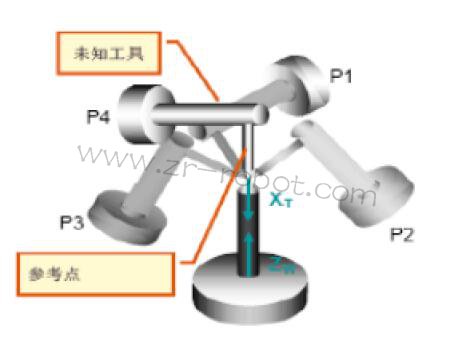
从四个不同的方位靠近参考点(P1 to P4)。
技巧提示: 设定最后的方位(P4) 这样的话+XT将沿着-ZW 的方向运动。
 在参考点附近要降低速度,以免相撞。
在参考点附近要降低速度,以免相撞。



