
1.槪述
如果欲使KUKA机器人工具在程序控制下移动至某点,则必须編制相应的移动指令。此 指令包含移动方式和速度、目标点的定义(在圆周轨迹上还需要辅助点)及其它 与此移动方式相关的设置情况。
在下列几节中将描述所有移动指令、它们的意义及其使用目的。
2.移动方式
在移动編程时,有下列移动方式可供选择:
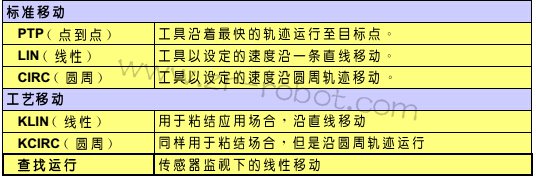
这两个移动指令KLIN和KCIRC的高速轨迹移动时具有更好的逼近特性。此外,逼近半径可以通过一个精度标准进行调整。
选项菜单“工艺移动,中的“查找运行”菜单项有一个特殊的功能。通过这个指 令,KUKA机器人可在传感器监视下移动至某个点。
如果有多个、彼此相接的移动指令,存在两种可能性来完成各点之间的移动:

您必须首先把工作程序置于編辑模式或者将此程序选定,而后才可以进行移动 指令的編程。与此相关的进一步信息请参考资料分冊[操作使用]章节[资源管 理器],和[用戶编程]章节[程序处理]。
通过按菜单键“指令”,可以打开选择菜单及其下属菜单中的“标准移动”或者“工艺移动”

这时,您可以通过光标键来选择相应的移动指令。如果您接着按回车键,则将打开InLine表格以便进行参数设置。
注意:“标准移动”所需的InLine表格也可以通过按软键“PTP/LIN/CIR,来打开。 在选定工作程序之后或者通过软键“編辑,调用程序之后,将出现此软键。
如果一个或多个KUKA机器人转轴,以快于手动速度(出厂定义为最大20 cm/s)的速度、末加制动地与各自的限位装置对撞,必须马上換上相应的新的缓冲器!如 果此情况发生在墙面安装的KUKA机器人上,并且涉及到轴1时,必须更換转盘!
与此相关的进一步信息请参阋资料分冊[操作使用]章节[KUKA机器人的手动运行]。




