
一旦选择 “Gripper”,为Gripper配置的状态窗口被打开。有效的gripper的确省设置号是16.
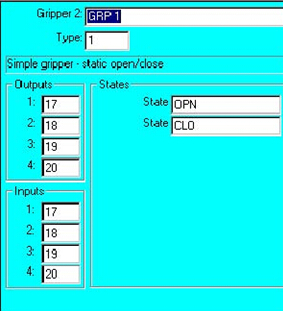
Gripper<Name>
Gripper 的名字;24个符号。 Gripper type<Number> Gripper的功能类型 Outputs<Number>
KUKA机器人控制器输出到Gripper执行机
构的分配
Inputs <Number> KUKA机器人控制器输入到Gripper传感器 的分配
State<Name>
Gripper状态的选定,取决于Gripper的类型;11个字符。
软键“Continue”和“Previous”用于在可能的16个夹钳Gripper之间转换。
按软键“Change”保存所做的设置。 使用软键“Close”关闭当前的状态接口。
关于 “Grippers”更详细的介绍在资料[Gripper Tech H50].




