
 这个功能用于旧
这个功能用于旧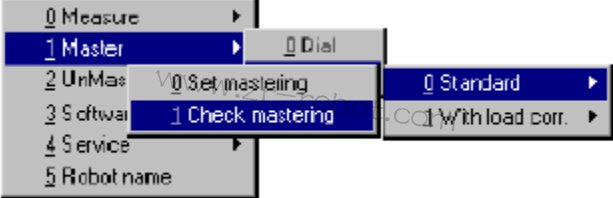
这个功能仅仅在测试“T1”运行方式时有效。如果选择这个功能时,设置不同的运行方 式,将产生相应的错误信息。
KUKA机器人校正准备的描述见1.3.3章节,选择菜单“标准”下的子菜单“检查校
打开一个窗口,预校正的轴列出
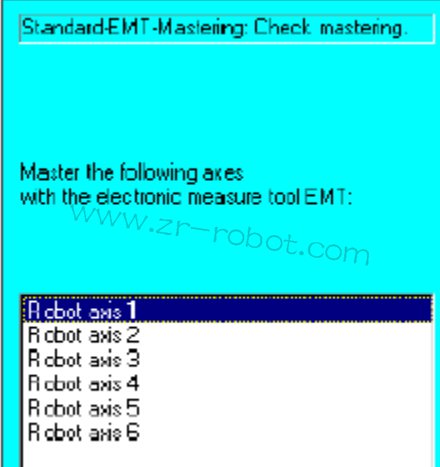
 如果假如2轴还没有校正,或者不需要校正,系统不可能去校正2轴以后的轴。2 轴必须用“设置校正”或“检查校正”校正后,才能按顺序校正以后的轴,如3号 轴。
如果假如2轴还没有校正,或者不需要校正,系统不可能去校正2轴以后的轴。2 轴必须用“设置校正”或“检查校正”校正后,才能按顺序校正以后的轴,如3号 轴。 需要检查校正的轴按软键“检查”选择。“需要启动键”信息出现在信息窗口。
需要检查校正的轴按软键“检查”选择。“需要启动键”信息出现在信息窗口。 按下KCP背后的使能开关时,然后按“程序启动向前键”[显示屏的左边],两键同 时保持按下。KUKA机器人的轴在程序控制下从“+”向移动。当电子检测探头发现到 达检测刻槽的底部时,校准程序将停止。计算出的值和插图窗口状态打开如下,和旧 校正不同的是,显示的是增量和度数。
按下KCP背后的使能开关时,然后按“程序启动向前键”[显示屏的左边],两键同 时保持按下。KUKA机器人的轴在程序控制下从“+”向移动。当电子检测探头发现到 达检测刻槽的底部时,校准程序将停止。计算出的值和插图窗口状态打开如下,和旧 校正不同的是,显示的是增量和度数。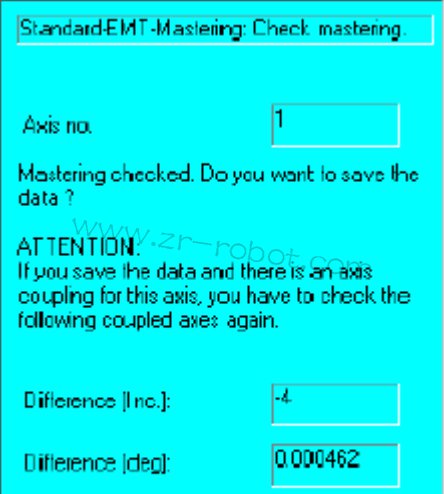
 按下软键“保存”,保存校正值,以便能选择下一轴
按下软键“保存”,保存校正值,以便能选择下一轴 你必须明白,当同意新校正值时,依靠增量的差别,执行编程操作期间可能遇到困难。 这种情况下,必须学习所有的程序。接受后来所有与机械有联系的轴[直线轴通常与机械连接]的新的校正值和校正好的补 偿值。既然这样,当校正完成后,如果背离太大,绝对需要检查这些轴的校正值。
你必须明白,当同意新校正值时,依靠增量的差别,执行编程操作期间可能遇到困难。 这种情况下,必须学习所有的程序。接受后来所有与机械有联系的轴[直线轴通常与机械连接]的新的校正值和校正好的补 偿值。既然这样,当校正完成后,如果背离太大,绝对需要检查这些轴的校正值。 每个轴校正完后,记得旋紧检测头上的保护帽,不要漏开以免异物进入,损坏灵敏的测 量装置,花费昂贵的维修费用。
每个轴校正完后,记得旋紧检测头上的保护帽,不要漏开以免异物进入,损坏灵敏的测 量装置,花费昂贵的维修费用。



