各控制轴上,分别设有原点和可动范围。控制轴到达可动范围的极限,叫做超程(OT)。各轴都在可动范围的两端进行超程检测。只要不是由于伺服系统的异常和系统出错而导致原点位置丢失,fanuc机器人的动作都不会超出可动范围。
此外,为了进一步确保安全,还提供采用机械式制动器的可动范围限制。
图 3.3 (a)示出机械式制动器的位置。其结构上为在J1~J3 轴的机械式制动器变形时会使FANUC机器人安全停止。务须将已经变形的制动器更换为新的制动器。请勿进行机械式制动器的改造等。否则有可能导致FANUC机器人不能正常停止。
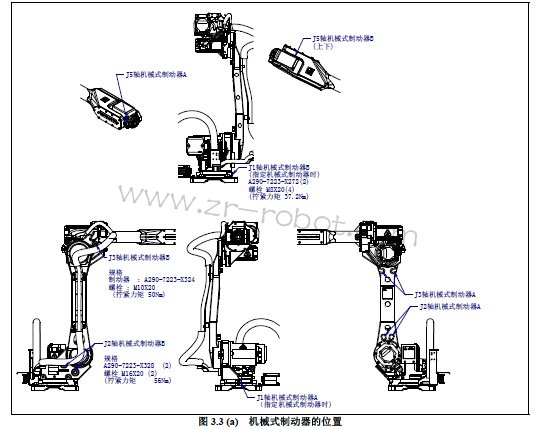
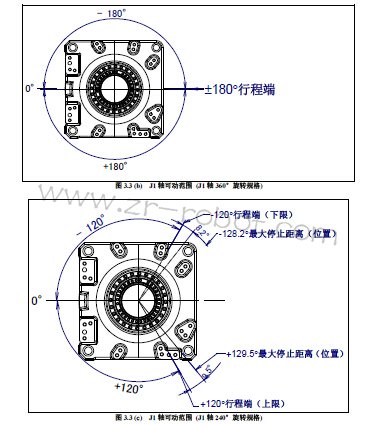
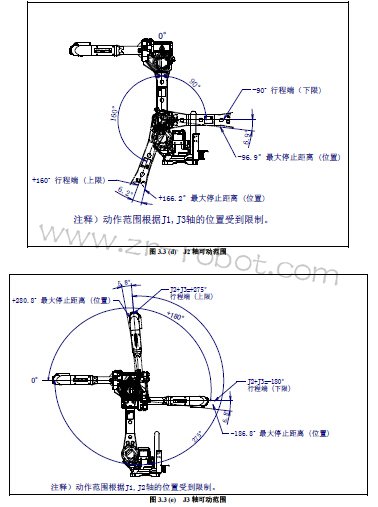
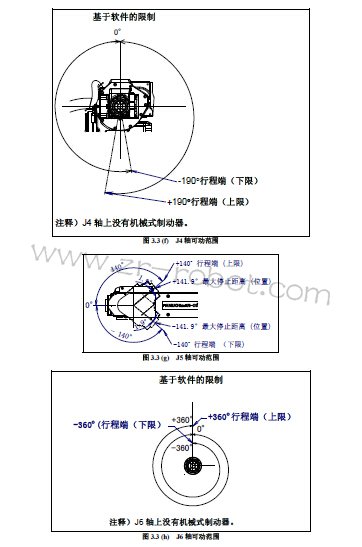
图 3.3 (b)~3.3 (h)中示出各轴的原点、可动范围、以及最大停止距离(位置)(最高速度、最大负载时的停止位置)。
※可动范围可以变更。变更详情,请参阅第 6 章“变更可动范围”。
注意
根据 J1,J2,J3 轴的姿勢,J1 可動部电缆和机器人手臂有可能接触。通常的动作的时候,不会损坏电缆。
接触频次较高的使用时,请定期检修电缆。