
进行机器人各轴的角度标记对准工作。这要求操作者首先将机器人的4、5和6轴精确地对准标尺位置,确保它们处于预设的基准状态。随后,再对1、2和3轴进行对准。值得注意的是,1、2、3轴通常只能进行联动调整,而4、5、6轴则可以单独进行微调,以适应不同的工作需求。
接下来,进入高级用户模式。操作者需要输入特定的用户名“R314”以及对应的密码“12345”,以获取进行后续操作的权限。
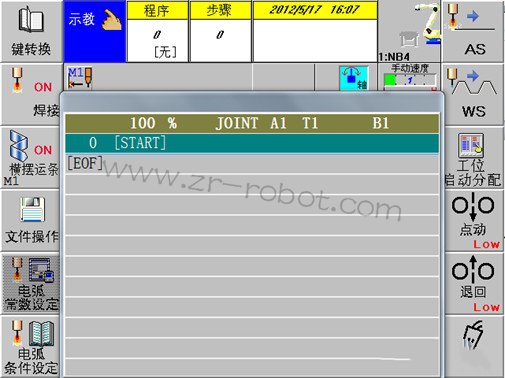
随后,进行编码器的复位操作。这一步骤需要操作者同时按下“Enable”键和F5键,从而进入常数设置界面。在这里,操作者需要选择机械常数,并进一步选择编码器校正选项。通过按下F9键,可以执行编码器的复位操作。在此过程中,操作者需要谨慎选择需要复位的轴,尽可能减少对每个轴的复位次数,以避免不必要的麻烦。
完成OTC机器人维修复位操作后,需要重新断电并再次开机。这一步骤通常可以解除1016 0052等报警信息,使机器人恢复正常工作状态。
如果在复位过程中发现踏板的位置角标记不正确,那么可能需要重复上述步骤,以确保机器人的位置定位准确无误。
在OTC机器人维修复位操作中,如何确定哪些轴需要单独调整呢?
这需要根据机器人的具体型号和配置来判断。不同型号和配置的OTC机器人,其轴配置和运动方式可能存在差异。在进行复位操作时,操作者需要充分了解自己所用机器人的特点,以确定哪些轴需要单独调整。
机器人的工作环境和任务需求也是影响轴调整的重要因素。在狭窄的空间中工作时,可能需要对某些轴进行单独调整,以适应空间限制。机器人的运动轨迹和姿态也会影响轴的调整需求。复杂的曲线运动可能需要更精细的轴调整,以实现精确的运动控制。
机器人的传感器反馈也是确定轴调整需求的重要依据。如果某个轴的运动出现偏差,传感器可以检测到这一偏差并提供反馈。操作者可以根据传感器的反馈信息,确定需要单独调整的轴,并进行相应的调整操作。
如果OTC机器人维修复位失败,那么应该采取以下措施进行排查和欧地希机器人维修解决:
检查电源和线路连接情况。确保机器人的电源供应正常,电源线和其他连接线没有松动或损坏。尝试重启机器人,以排除一些临时性的故障。如果问题依旧存在,那么需要检查机器人的传感器和执行器是否正常工作。如有损坏或故障,需要及时更换或修理。最后,检查工业机器人的程序和参数设置是否正确。如有错误或不当之处,需要进行重新编程或调整参数。
在进行OTC机器人的复位操作时,请务必遵循所有安全规程。需要综合考虑以上因素,以确定哪些轴需要单独调整。根据具体的情况和经验进行调整操作,以确保机器人的正常运行和工作效率。




