在进行零点复归操作时,需将机器人的机械信息与位置信息精确同步,以便清晰地定义其在物理空间中的位置。这一步骤至关重要,它要求我们必须以准确无误的方式操作机器人,以确保零点复归的顺利进行。通常情况下,机器人在出厂前,即由FANUC Robotics这样的专业制造商完成了零点复归的设定。在实际应用中,由于各种原因,机器人可能会丢失零点数据,这时,就需要重新进行零点复归操作。
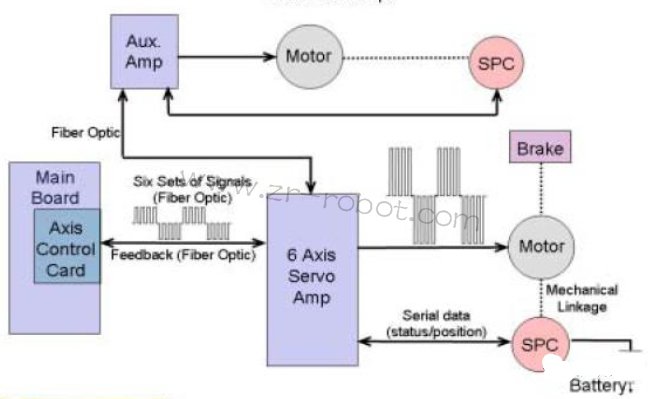
机器人通过一套精密的闭环伺服系统来控制其本体上的各个运动轴。FANUC喷涂机器人维修控制器会输出精确的控制命令,以驱动每一个马达的运转。而装配在马达上的反馈装置——串行脉冲编码器(SPC),则负责将马达的运转情况实时反馈给控制器。在机器人的操作过程中,控制器会不断地分析这些反馈信号,并根据分析结果修改命令信号,以确保机器人在整个运动过程中都能保持正确的位置和速度。
为了确保机器人能够准确地按照预定位置移动,控制器必须“知晓”每个轴的确切位置。这是通过比较操作过程中读取的串行脉冲编码器的信号与机器人上已知的机械参考点信号之间的差异来实现的。FANUC喷涂机器人维修零点复归操作正是为了记录这些已知机械参考点对应的串行脉冲编码器的读数。这些重要的零点复归数据,以及其他用户数据,都会被保存在控制器的存储卡中。即使在断电后,这些数据也能由主板电池维持其完整性。
当FANUC喷涂机器人维修控制器正常断电时,每个串行脉冲编码器的当前数据都会被保留在编码器内部,并由机器人上的后备电池供电维持(对于P系列机器人来说,后备电池可能位于控制器上)。当控制器重新上电时,它会向脉冲编码器发出请求,读取这些数据。只有当控制器成功接收到脉冲编码器的读取数据时,伺服系统才能正确地开始工作。这一过程我们通常称之为校准过程,它在每次控制器开启时都会自动进行。
如果在FANUC喷涂机器人维修控制器断电时,脉冲编码器的后备电池电源被断开,那么在上电时,校准操作就会失败。这时,机器人唯一可能进行的操作就只有关节模式的手动操作了。为了恢复机器人的正常操作功能,我们必须对其进行重新零点复归与校准。
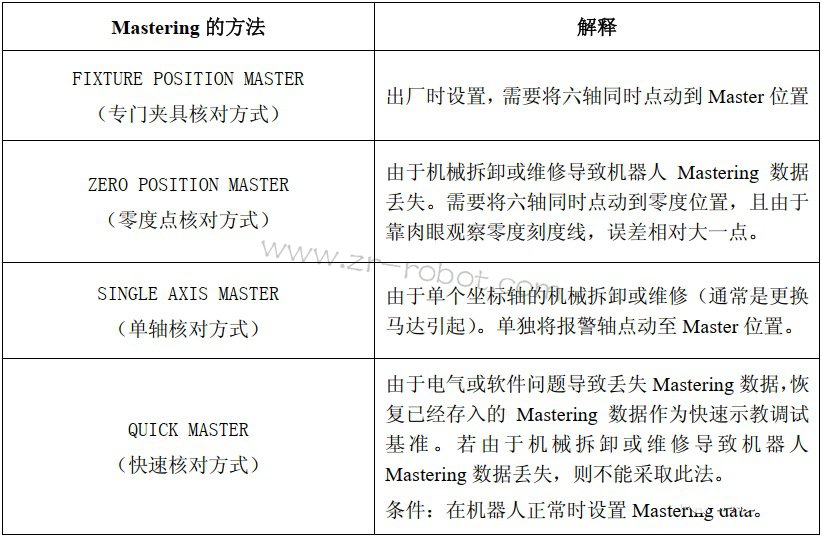
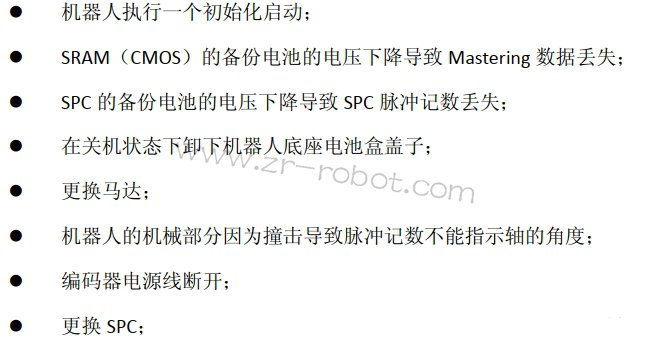
值得注意的是,由于Mastering(零点复归)的数据在出厂时已经设置好了,所以在正常情况下,我们并不需要执行Mastering操作。只要发生以下情况之一,就必须执行Mastering操作:
- 机器人丢失了零点数据;
- 控制器断电时脉冲编码器的后备电池电源被断开导致校准失败。
接下来,将详细介绍零点复归(Mastering)的具体方法(图)。