
COMAU机器人维修的轴补偿模块,其工作机制是一套精密的系统,旨在实时监测并补偿机器人各关节的位置误差,从而显著增强运动精度与系统的整体稳定性。这一模块巧妙地集成了传感器与补偿控制器于关节驱动系统之中,能够即时捕捉到任何关节位置的细微偏差。一旦传感器捕捉到关节的实际位置与预设期望值之间的任何不一致,补偿控制器便会迅速介入,通过精密的计算,确定出必要的补偿值,并据此调整驱动系统,确保柯马机器人维修关节位置的精确无误。这一系列的补偿动作,有效地削弱了由机器人结构的柔度以及控制过程中的误差所带来的运动不稳定性,进而为产品质量的提升和生产效率的飞跃奠定了坚实的基础。
当机器人的轴定位出现偏差时,其影响是多方面的且深远的柯马机器人维修:
- 加工精度的显著下滑:机器人的关节与连杆在实际运动过程中,可能会偏离设计的理想轨迹,这直接导致了机器人在加工零部件或组装配件时精度的降低。
- 机器人的稳定性与安全性受到威胁:定位的不准确,可能使得机器人在高速运转或承受较大负载时,出现明显的晃动或不稳定现象,严重时甚至可能引发碰撞事故或其他安全隐患。
- 重复定位精度的严重下降:若机器人的绝对定位精度无法保障,那么在相同的程序指令下,多次执行同一任务时,其执行位置可能会出现显著的偏差,这对于产品的一致性和可靠性构成了极大的挑战。
- 作业效率的明显下降:定位的不准确往往需要人工的频繁干预或重新校准,这不仅增加了额外的维护成本,还可能导致生产线的整体效率受到严重的影响。
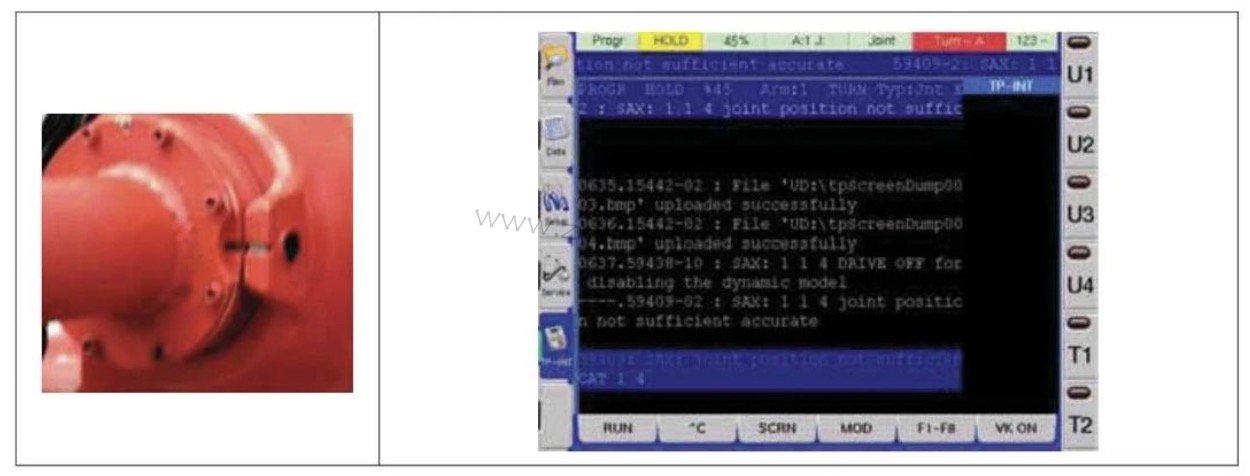
在面对柯马机器人维修轴定位错误时,必须谨慎行事,避免发送转动设置(TURN SET)指令,因为这可能会使轴锁定在错误的位置。应执行以下任一程序来恢复轴的正确位置:
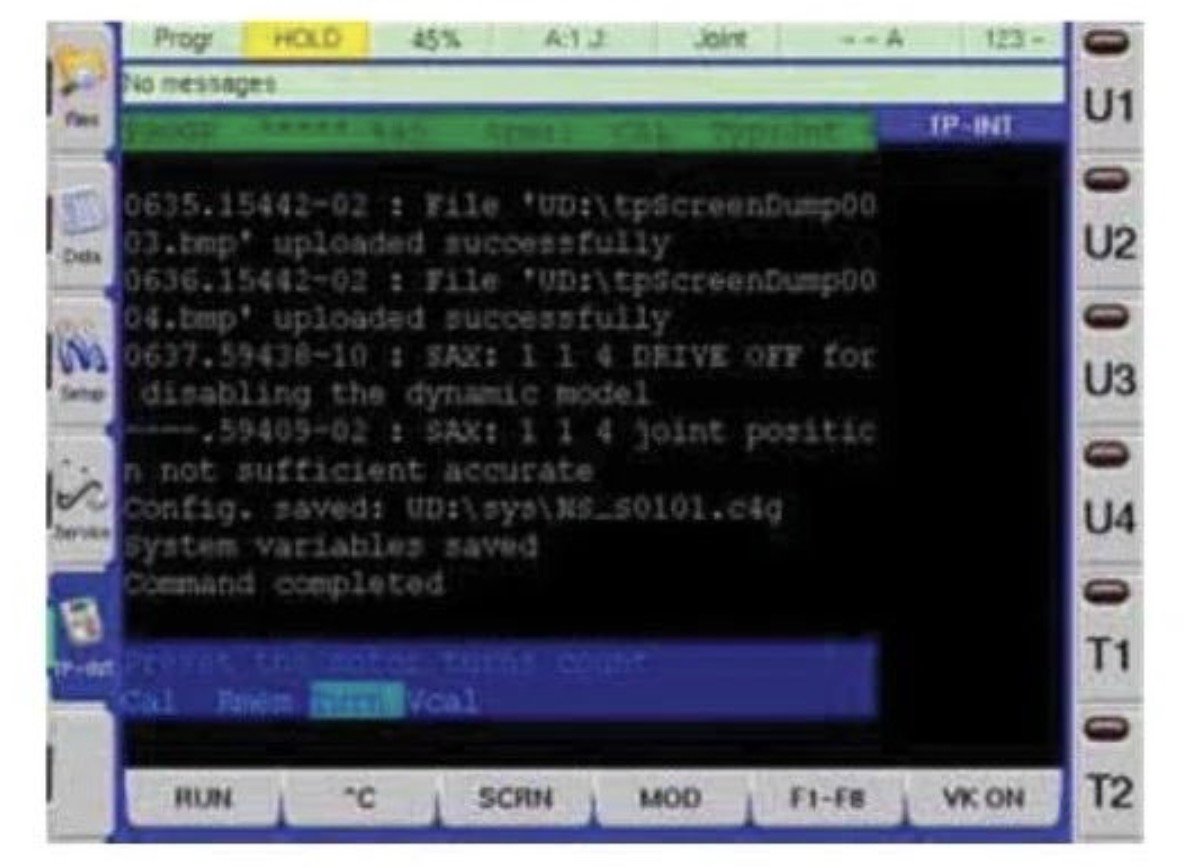
- 可以尝试手动转动轴,寻找上次校准后轴的准确旋转位置。一旦对准了相应的凹槽,便可以执行转动设置(TURN SET)指令。当轴回复到正确位置后,终端会显示“指令已完成”(Command Completed)的确认信息。
- 或者,可以选择进行完整的轴校准操作。
关于柯马机器人维修轴定位的正确信息与错误信息,需要明确区分。在校准过程中,目标是确保机械轴能够准确地定位,并将机器人调整至最佳的工作状态。这一操作能够初始化机械轴的设定值,并将机器人内部程序中的位置变量设置为通用型。在校准程序中,当需要校准的机械轴处于校准位置时,需要存储两个关键的数据:一是转换器转动周期内,实际位置与轴指定位置之间的偏差值;二是转换器的转动次数。对于已经安装完毕的机器人,其后续的转动设定操作可以通过观察并对准单个机械轴上的凹槽来完成。




