
fanuc机器人零点位置标定的方法数据的直接输入,可将FANUC机器人零点位置标定的方法数据值直接输入到系统变量中。这一操作用于FANUC机器人零点位置标定的方法数据丢失而脉冲数据仍然保持的情形。
FANUC机器人零点位置标定的方法数据的输入方法
1 、按下“MENU”键,选择“6 SYSTEM”。
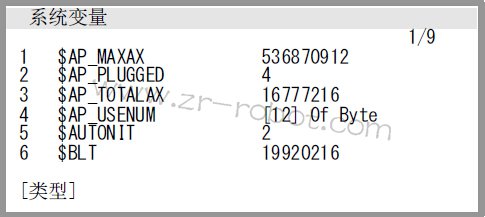
2 、通过画面切换选择“Variables”(系统变量)。出现系统变量画面。
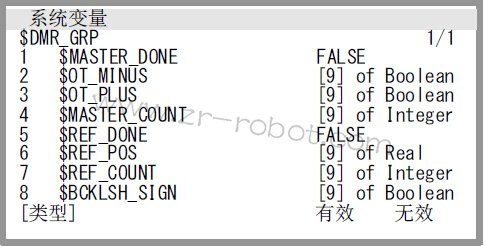
3、 下面,改变FANUC机器人零点位置标定的方法数据。FANUC机器人零点位置标定的方法数据存储在系统变量$DMR_GRP. $MASTER_COUN 中。

4 、选择$DMR_GRP。

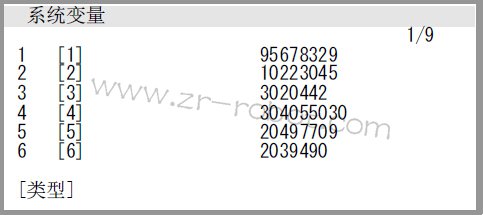
5、 选择$MASTER_COUN,输入事先准备好的FANUC机器人零点位置标定的方法数据。
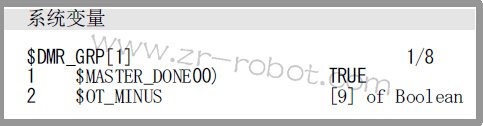
6、按下PREV(返回)键。
7、 将$MASTER_DONE 设定为TRUE 中。
8、 出现位置调整画面,选择“6 CALIBRATE”,按下F4“YES”。
9、 位置调整结束后,按下F5“DONE”。





