
A/M/F (输出端/状态寄存器/标帜器)
输出端、状态寄存器或标帜器均可以通过KUKA系统操作数联系在一起編程。状态寄存器被 动态分析处理,输出端和标帜器只在给定的时间点被分析处理。
此功能以下列的句法为基础:
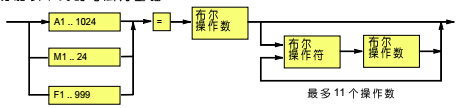
选定此软键后,出现如下的InLine表格:
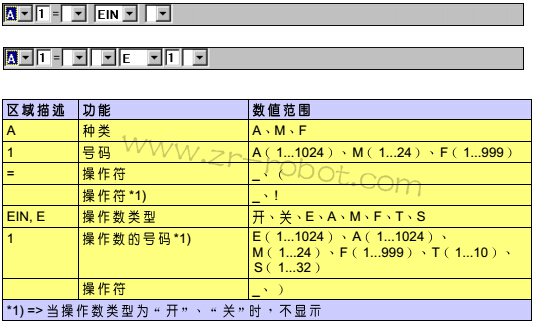
举例

在此例中,输出端3在下列情况被置位
1.当输入端3及输出端7均有信号(“TRUE”)时,或者
2.当输入端3及输出端11均有信号(“ TRUE”)时。




