在工具坐标系中手动移动

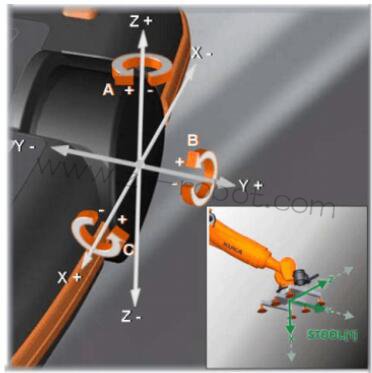
图 2-12: 机器人工具坐标系
图 2-12: 机器人工具坐标系
在工具坐标系中手动移动时,可根据之前所测工具的坐标方向移动机器人。
因此,坐标系并非固定不变(例如:世界坐标系或基坐标系) ,而是由机器人引导。
在此过程中, 所有需要的机器人轴也会自行移动。哪些轴会自行移动由系统决定,并因运动情况不同而异。
工具坐标系的原点被称为 TCP ,并与工具的工作点相对应。
为此需要使用移动键或者 KUKA smartPAD 的 3D 鼠标。
可供选择的工具坐标系有 16 个。
速度可以更改(手动倍率: HOV)
仅在 T1 运行模式下才能手动移动。
确认键必须已经按下。

工具坐标时手动移动的原则
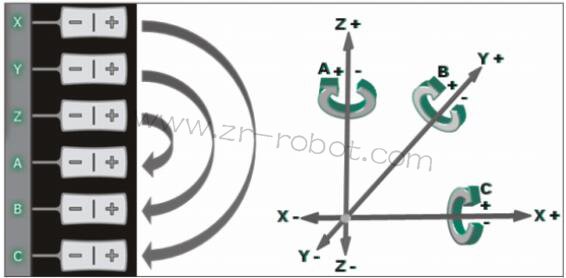
图 2-13: 笛卡尔坐标系
在坐标系中可以两种不同的方式移动机器人:
沿坐标系的坐标轴方向平移(直线) : X 、Y、Z
环绕着坐标系的坐标轴方向转动(旋转/ 回转) : 角度 A 、B 和 C
使用工具坐标系的优点:
要工具坐标系已知,机器人的运动始终可预测。
可以沿工具作业方向移动或者绕 TCP 调整姿态。工具作业方向是指工具的工作方向或者工序方向: 粘胶喷嘴的粘结剂喷出方向,抓取部件时的抓取方向等。
操作步骤
1. 选择工具作为所用的坐标系。

2. 选择工具编号

3. 设定手动倍率。

4. 按下确认开关的中间位置并保持按住。
5. 用移动键移动机器人。

6. 或者: 用 3D 鼠标将机器人朝所需方向移动。