
用这种方法确定工件[基坐标]的参考点。
它将通过用工具到达和存储三个特殊点来实现,控制部分已经知道工具的尺寸。这三个点即 决定原点的位置,也决定了工件坐标系的取向。

执行
将一个控制部分已经知道尺寸的工具安装在KUKA机器人法兰上。
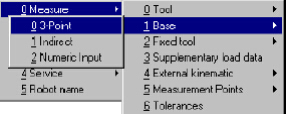
通过菜单键“开机运行”打开菜单,接着打开子菜单“基坐标”和指令“3点
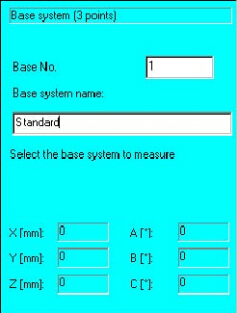
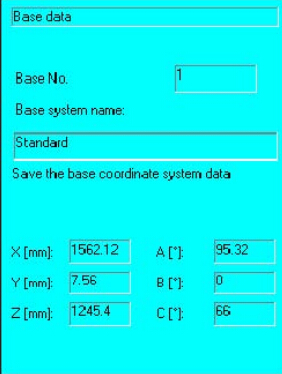
基坐标系的输入窗口将被打开:
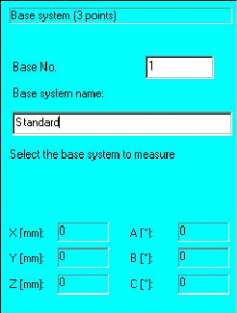
用+/-状态键[显示屏的右下侧]选择基坐标系统。

你能用箭头键进入基坐标系统代号输入条,输入基坐标系统代号。
按软键“基坐标正确”[显示屏的底部],以便打开下一个输入窗口。接着打开选择参考工具的输入窗口:
用状态键+/-(显示屏的底部)选择工具号。

按软键“工具准备好”[显示屏的底部],以便用这个工具进行检测^ 将打开下列窗口。

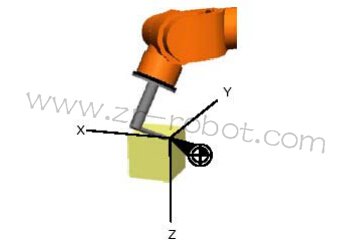
系统将提示你用TCP [工具中心点]到达未来的工件坐标系[基坐标]的原点。
在工件附近降低进给速度,以避免相撞。
为此重复按状态键[显示屏的右上侧]
当TCP [工具中心点]准确地与工件坐标系[基坐标]希望的原点重叠,按软键“点正 」确”接受这个位置。
下一个窗口打开:
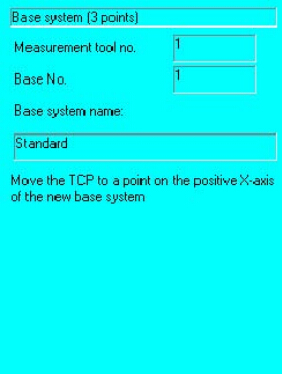
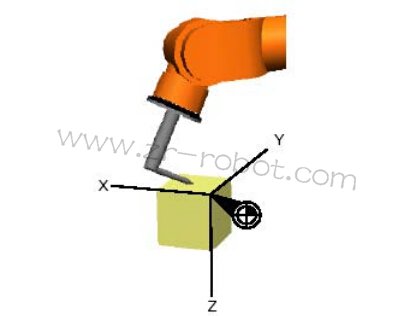
系统将要求你通过驶近某点来告诉控制部分X轴的取向……
先将工具从工件移开:
在工件附近降低进给速度,以避免相撞。
为此重复按状态键[显示屏的右上侧]。
当TCP [工具中心点]准确地与所需的点重叠,按软键“点正确”接受这个位置。
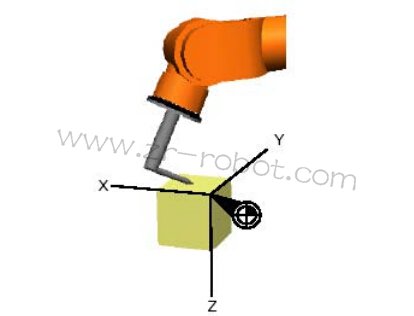
系统将要求你通过抵达某个Y值为正的点,来告诉控制部分XY平面的取向情况。 先将工具从工件移开:
下列对话窗口打开:
在工件附近降低进给速度,以避免相撞。
为此重复按状态键[显示屏的右上侧]
当TCP [工具中心点]准确地与Y值为正的点[在XY平面]重叠,请按软键“点正确 接受这个位置。
启动
启动
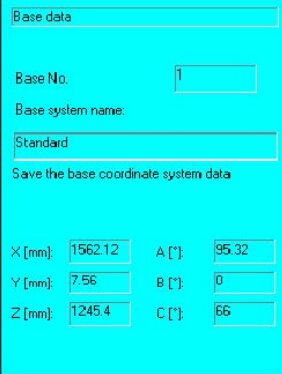
按下软键“检测点”,再次列出单独测量值的窗口出现。
按软键“存储”[显示屏的下面],存储这些工件数据。此功能结束。




