
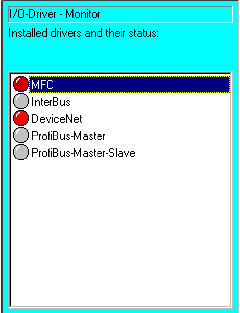
驱动能够被显示、安装、卸除和使用菜单指令进行变更。当选择菜单项目“I/O Drive” 时,下面的状态窗口出现:
使用软键“Configure”改变I/O配置,下面的窗口出现:
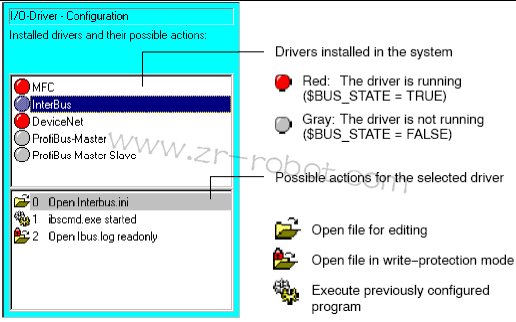
状态窗口划分为两部分,上面的部分是驱动列表,下面的部分是动作列表。
使用“↑”和“↓”键选择要求的驱动或动作。
使用“→”和“←”在驱动表和操作表之间转换。
软键“New inst.”, “Iosys” 和 “Deinstall.”在低于专家级别时不能选择。
驱动表用这个功能,打开一个安装附加驱动的状态窗口口。
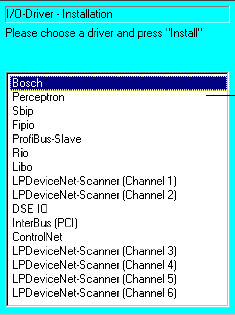
“Install”安装选择的驱动
“Back” 返回到主I/O配置窗口
“Close” 关闭I/O drivers的配置。
软键“Iosys”装载文件IOSYS.INI 进入KUKA示教器编辑器。
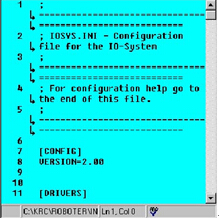
软键“Close”保存改变,关闭KUKA示教器编辑器
“Navigator”让你进入KUKA机器人控制器Navigator.
所有的I/O已配置,没有程序可以选择。在这个功能执行期间,软功能键无效。
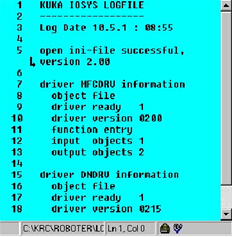
为获得更详细的说明,按软键“info”,它装载文件 “IOSYS.LOG”进入有写保护的 KUKA示教器编辑器。
软键“Close”关闭KUKA示教器编辑器
“Navigator”带你进入KUKA机器人控制器Navigator.
当软键“Deinstall”按下时,选择的驱动被卸除,记录从驱动表上删除。
选择的驱动被复位。
如果操作表有效,软键“Deinstall”和“Reset”无效,它们由”Jump”和”OK”替代。
光标移动到驱动表。
选择的动作被执行。下列动作有效。 装入文件到KUKA示教器编辑器 装入文件到有写保护的KUKA示教器编辑器 执行定义的程序
使用软键”Close”结束动作,关闭窗口。




