KUKA机器人伺服电机和编码器同时更换时,使用“更换”。KUKA电机或编码器更换后,必须执行此功能。
 这个功能也许仅仅服务部门执行,或在培训
这个功能也许仅仅服务部门执行,或在培训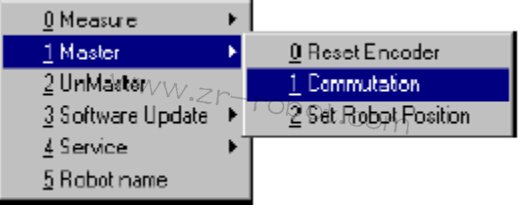
相应的对话窗口打开,所有需要更换的轴显示在窗口。
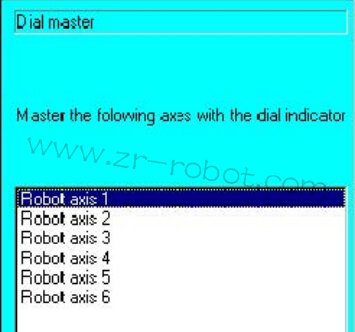
 然后移动需要的轴到垂直位置,按下“启动键”。
然后移动需要的轴到垂直位置,按下“启动键”。 必须移动到垂直位置,因为轴制动将暂时释放。不利的位置也许在校正过程中导致KUKA电机 无端动作。
必须移动到垂直位置,因为轴制动将暂时释放。不利的位置也许在校正过程中导致KUKA电机 无端动作。 按下软键“校正”。询问轴制动暂时释放,同时轴制动再次执行。登录相应的轴不离开列表,程序能重复一些时间
按下软键“校正”。询问轴制动暂时释放,同时轴制动再次执行。登录相应的轴不离开列表,程序能重复一些时间 然后移动需要的轴到垂直位置,按下“启动键”。必须移动到垂直位置,因为轴制动将暂时释放。不利的位置也许在校正过程中导致KUKA电机 无端动作。按下软键“校正”。询问轴制动暂时释放,同时轴制动再次执行。登录相应的轴不离开列表,程序能重复一些时间
然后移动需要的轴到垂直位置,按下“启动键”。必须移动到垂直位置,因为轴制动将暂时释放。不利的位置也许在校正过程中导致KUKA电机 无端动作。按下软键“校正”。询问轴制动暂时释放,同时轴制动再次执行。登录相应的轴不离开列表,程序能重复一些时间




手机扫一扫添加微信