
 手动移动KUKA机器人的说明见[操作控制]中[KUKA机器人的手动移动]一章。
手动移动KUKA机器人的说明见[操作控制]中[KUKA机器人的手动移动]一章。 把所有待校正的轴移到预校正位置。预校正位置依靠KUKA机器人的型号而定。
把所有待校正的轴移到预校正位置。预校正位置依靠KUKA机器人的型号而定。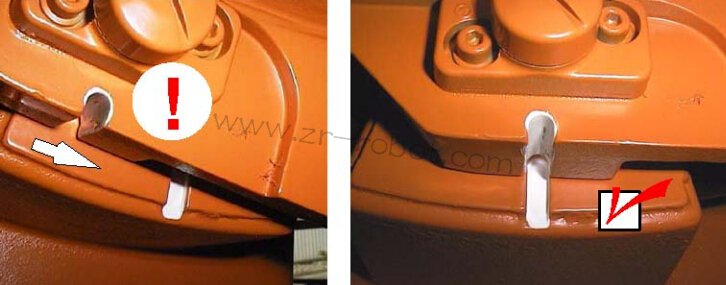
 一个轴必须从“+”到移动到机械零点位置。如果一个轴必须从到“+”转动, 它首先必须转过预校正位置的标记处,然后再返回这个标记。这是很重要的,可以消除齿 轮传动的反向间隙。
一个轴必须从“+”到移动到机械零点位置。如果一个轴必须从到“+”转动, 它首先必须转过预校正位置的标记处,然后再返回这个标记。这是很重要的,可以消除齿 轮传动的反向间隙。
拿开检测头上的保护帽,装上千分表。

 这个功能仅在测试[T1,T2]运行方式下有效。如果在选择这项功能时,选择另一种运行方 式,将产生相应的错误信息。
这个功能仅在测试[T1,T2]运行方式下有效。如果在选择这项功能时,选择另一种运行方 式,将产生相应的错误信息。 按开机运行”菜单键,一个菜单打开,选择“校正”选项。子菜单打开,确定选“千分表”
按开机运行”菜单键,一个菜单打开,选择“校正”选项。子菜单打开,确定选“千分表”
打开一个待校正的轴的状态窗口:
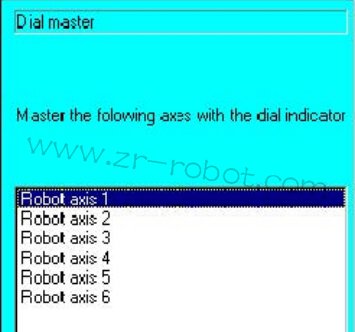
 需要校正的轴按顺序显示,
需要校正的轴按顺序显示,
已经校正好的轴不列出,如果想重新校正它,必须先取消校正。如果轴1已经校正好,校正其它轴时它可以移动。其它手臂轴2轴到6轴也许不需要移动直到全部轴校正完。
 如果试图跨过第1轴校正第2-6轴,校正操作将失败。校正必须注意,从最小数的轴即第一轴开始。
如果试图跨过第1轴校正第2-6轴,校正操作将失败。校正必须注意,从最小数的轴即第一轴开始。
校正开始前,请还原手动倍率到百分之一。沿着轴的负方向将待校正的轴转过预校正位置的标 记,同时观察千分表的指针。在检测刻槽的最低位置,指针陡峭变化时,把千分表调到零。 在此之后,再次运行此轴到预校正位置,重新沿着轴的负方向转动待校正的轴。当千分表的指 针大约位于零点位置前5-10刻度时停止。为了提高校正的精度,现在最好以固定的单步更加 小心的移动KUKA机器人。为此,需要改变手动移动的进给量。
 手动增量移动在[操作控制]菜单下选[KUKA机器人手动移动]。
手动增量移动在[操作控制]菜单下选[KUKA机器人手动移动]。
这时按压移动键,轴仅转动一小步。这种方式下,沿着负转向转动此轴,直到千分表到达零 点位置。
 如果超过此点,你必须返回预校正位置,重新校正。
如果超过此点,你必须返回预校正位置,重新校正。
在轴当前位置,校正的轴突出的颜色条显示,按压软键“校正”此轴保存机械零点位置。 已经校正好的轴从窗口离开。
 下一个轴校正前或全部校正工作结束后,开关选择返回到普通移动模式。
下一个轴校正前或全部校正工作结束后,开关选择返回到普通移动模式。
每个轴校正完后记住拧紧检测头上的保护帽。若有异物进入,将损坏灵敏的测量装置,花费昂 贵的维修费用。




