-

-
-
-
-
-
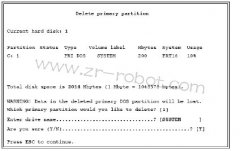
KUKA机器人安装系统时如何删除逻辑驱动器?
选择选项3. 在扩展 DOS 分区删除逻辑DOS 驱动器 在 这 个 例 子 中 , 总 共 3 个逻辑驱动器已经设置, 它...
2017-03-29
-
-
-
-
-
-





选择选项3. 在扩展 DOS 分区删除逻辑DOS 驱动器 在 这 个 例 子 中 , 总 共 3 个逻辑驱动器已经设置, 它...
2017-03-29



手机扫一扫添加微信