
- 广州子锐机器人技术有限公司
- 服务热线:020-82000787(8:30-17:30)
- 联系手机:15889988091(非工作时间)
- 座机:020-82000787
- 传真:020-32887675
- 邮箱:gz@zr-robot.com
- 广州市番禺区东环街金山谷创意八街1号109
- 当前位置:TAG
-

ABB机器人如何在全速手动模式下使用止-动功能? 【图】
关键词:ABB,机器,人如,何在,全速,手动,模式,使用,功能,使用使用止- 动功能 本说明详细介绍如何在全速手动模式下使用止-动功能。 操作 1. 按下FlexPendant 上的使动设备机器人驱动器 2. 通过按下并压住的方法选择执行模式: a 启动(连续执行) b 步进(步进执行) c 步退(步退执行) 3. 如果按下START (启动),机... 阅读更多>>
2017-04-13 -

ABB机器人如何手动设置用户框架值和工件框架值? 【图】
关键词:ABB,机器人,如何,手动,设置,用户,框架,工件,设置,A设置ABB机器人工件和用户坐标系位置的最简单方式是使用定义工件坐标系 页 158 介绍的方法。 你也可使用下图向导手动编辑该值。 附注 也可通过 程序数据 窗口编辑工件数据。... 阅读更多>>
2017-03-30 -
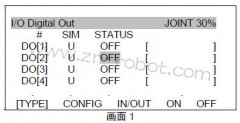
FANUC如何手动控制I/O 强制/输出? 【图】
关键词:FANUC,如何,手动,控制,强制,输出,数字,输出,为例,以数字输出为例 1.按MENU 键选择5 I/O,显示I/O画面(见画面1) 2.按F1 TYPE 选择Digital。 3.通过F3 IN/OUT 选择输出画面。 4. 移动光标到要强制输出信号的STATUS 处。 5.按F4 ON 强制输出,F5 OFF 强制关闭(见画面2)... 阅读更多>>
2017-03-25 -

什么是FANUC机器人手动执行程序? 【图】
关键词:什么,FANUC,机器人,手动,执行,程序,操作,模式,下图操作模式(见下图 ) 注:在某些新型号的FANUC机器人(如:RW 100iB)上,LOCAL 和REMOTE 的选择是通过软件设置的。... 阅读更多>>
2017-03-24 -
如何正确安全的操作FANUC机器人 【图】
关键词:如何,正确,安全,操作,FANUC,机器人,示教,手动,FA1.示教和手动FANUC机器人 1)请不要带者手套操作示教盘和操作盘。 2)在点动操作FANUC机器人时要采用较低的倍率速度以增加对FANUC机器人的控制机会。 3)在按下示教盘上的点动键之前要考虑到FANUC机器人的运动趋势。 4)要预先考虑好避让FANUC机器人的运动轨... 阅读更多>>
2017-03-16 -
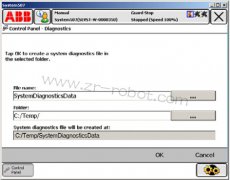
ABB机器人如何手动创建诊断文件? 【图】
关键词:ABB,机器人,如何,手动,创建,诊断,文件,下面,所述,手按下面所述手动创建诊断文件。 步骤 1. 点击ABB,然后点击控制面板,再点击诊断。显示以下屏幕: 2. 指定诊断文件的名称、其保存文件夹,然后点击确定。默认的保存文件夹是 C:/Temp,但可选择任何文件夹,例如外部连接的 USB 存储器。在显示 正在创建文件。... 阅读更多>>
2017-03-19 -
如何用千分表进行KUKA机器人校正? 【图】
关键词:何用,千分表,进行,KUKA,机器人,校正,手动,移动,KU手动移动KUKA机器人的说明见[操作控制]中[KUKA机器人的手动移动]一章。 把所有待校正的轴移到预校正位置。预校正位置依靠KUKA机器人的型号而定。 一个轴必须从+到移动到机械零点位置。如果一个轴必须从到+转动, 它首先必须转过预校正位置的标记处,然后再返... 阅读更多>>
2017-01-16 -
如何手动测试ABB机器人电路板 【图】
关键词:如何,手动,测试,ABB,机器人,电路板,手动,ABB,机器手动ABB机器人电路板测试治具是指:通过针床、手动测试治具、印制板插脚、输入/输出接口,向被测ABB机器人电路板施加控制信号及输入信号,并实时读取被测ABB机器人电路板的输出信号,通过一系列的数据分析处理,进而判断被测ABB机器人电路板的性能(或功能)... 阅读更多>>
2016-12-19 -
ABB机械手如何编程 【图】
关键词:ABB,机械手,如何,编程,ABB,机械手,编程,打到,手动ABB机械手编程: 1、将机械手打到手动状态,上电,进入编程窗口,选择special-----paint path,根据自己确定的喷涂路线修改路径。 2、修改好以后,左手托住示教器上电,经光标移到paint path的顶部,单击star键,当机械手开始运行时停止,根据设计好的路线调整... 阅读更多>>
2016-12-19 -
fanuc机器人手动示教机器人 【图】
关键词:fanuc,机器人,手动,示教,示教,模式,见表,关节,标示1.示教模式(见表1,图1) 表1 关节坐标示教(Joint) 通过TP上相应的键转动机器人的各个轴示教 直角坐标示教(XYZ) 沿着笛卡儿坐标系的轴直线移动机器人,分两种坐标系: 1)通用坐标系(World):机器人缺省的坐标系 2)用户坐标系(User):用户自定义的... 阅读更多>>
2016-12-12 -

FANUC机器人安全操作规程 【图】
关键词:FANUC,机器人,安全,操作规程,示教,手动,机器人,不要1、示教和手动机器人 (1)请不要带者手套操作示教盘和操作盘。 (2)在点动操作机器人时要ABB采用较低的倍率速度以增加对机器人的控制机器人维修机会。 (3)在按下示教器上的点动键之前要考虑到机器人的运动趋势。 (4)要预先考虑好避让机器人的运动轨... 阅读更多>>
2016-12-07 -

手动操作ABB机器人的步骤 【图】
关键词:手动,操作,ABB,机器,人的,步骤,操纵,窗口,切换,AB1、操纵窗口切换: 将ABB机器人操作模式选择器置于手动限速模式。 切换至操纵窗口。 2运动控制键: (1)运动单元切换键: ExternalUnit-外轴运动单元Robot-ABB机器人 光标指向ABB机器人,操纵杆操纵ABB机器人本体运动。 光标指向外轴,操纵杆操纵外轴,一台A... 阅读更多>>
2016-12-06
