
“KR3”型号的机器人,执行校正仅仅使用游标尺;这些游标尺安装在各个轴上。
![KUKA库卡机器人KR3的校正]() 库卡机器人KR3的校正" src="/uploads/161223/1-161223104203H6.jpg" style="width: 314px; height: 472px;" />KR3 的游标尺
库卡机器人KR3的校正" src="/uploads/161223/1-161223104203H6.jpg" style="width: 314px; height: 472px;" />KR3 的游标尺
“KR3”校正程序和校正功能表和“KRC1”与“KRC2”完全不同。“KR3”全部有三个 不同的指令可以使用。

首先选择运行方式“T1”,设置操作为“手动移动”。
选择手动移动时,机器人能建立文件“操作控制”,选择子功能表“机器人手动移动机器人”。
然后按下功能表键”开机运行”,选择功能表中的“校正”操作,在子功能表中选择需要的指令。
“KR3”校正程序和校正功能表和“KRC1”与“KRC2”完全不同。“KR3”全部有三个 不同的指令可以使用。
首先选择运行方式“T1”,设置操作为“手动移动”。
选择手动移动时,机器人能建立文件“操作控制”,选择子功能表“机器人手动移动机器人”。
然后按下功能表键”开机运行”,选择功能表中的“校正”操作,在子功能表中选择需要的指令。
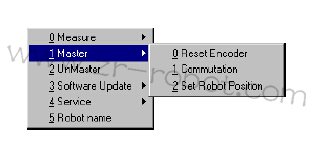
在“专用”工作组菜单下,菜单“交换”和“设置机器人位置”是无效的。




