
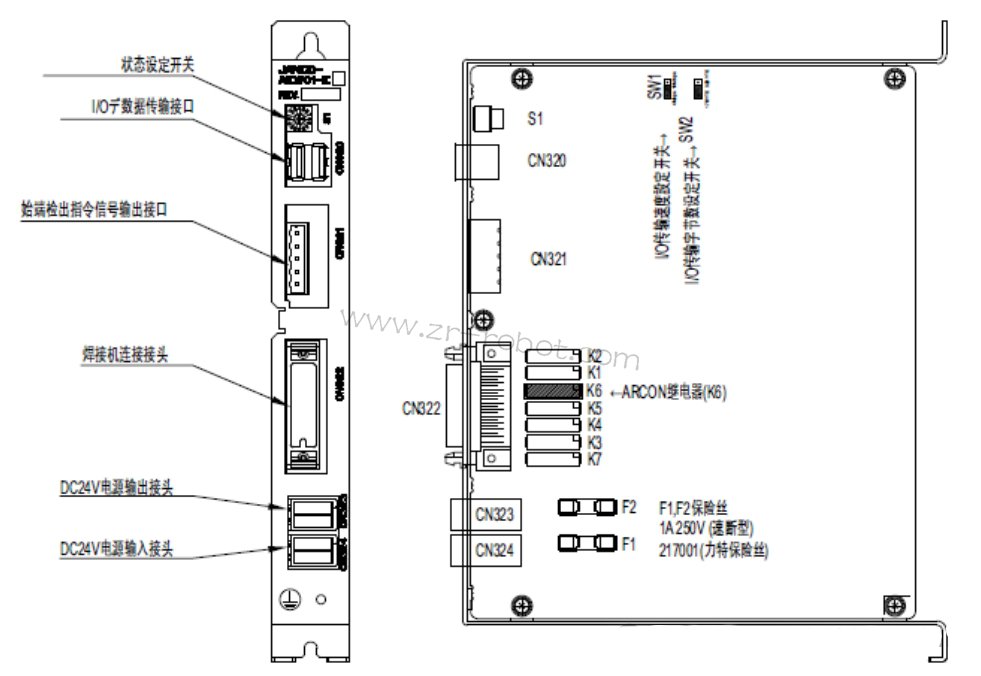
安川机器人控制柜的模拟功能是通过选配模拟量通讯基板来实现的,这一基板也被业界广泛称为焊机接口基板。具体而言,模拟量输出模块的功能相当关键,它能够将输入的数字信号经过数模转换,进而输出可以精确控制的连续电流与信号,以满足各种复杂的焊接需求。
在进行安川机器人维修之前,请确保您已准备好以下工具(如图所示):
- 必备组件:1块模拟量AEW01基板、2条专用的连接线缆以及1个终端插头。

- 安全措施:确保安川机器人控制柜已完全断电,以避免触电风险。
- 额外准备:模拟量基板的CN322端口可能需要您自备一个适配的插头。
- 工具辅助:一把长螺丝刀,便于在狭窄空间内进行安装或拆卸作业。
特别提醒:
- 在安川机械手维修基板时,请避免直接用手触摸基板的零件安装面,因为静电可能会对IC等精密零件造成损害。
- 请小心轻放YASKAWA机械手基板,避免任何形式的撞击,以免基板受损。
- 需要注意的是,不同型号的控制柜所配备的基板可能有所不同,因此在进行维修或升级时,请务必确认您的控制柜型号。
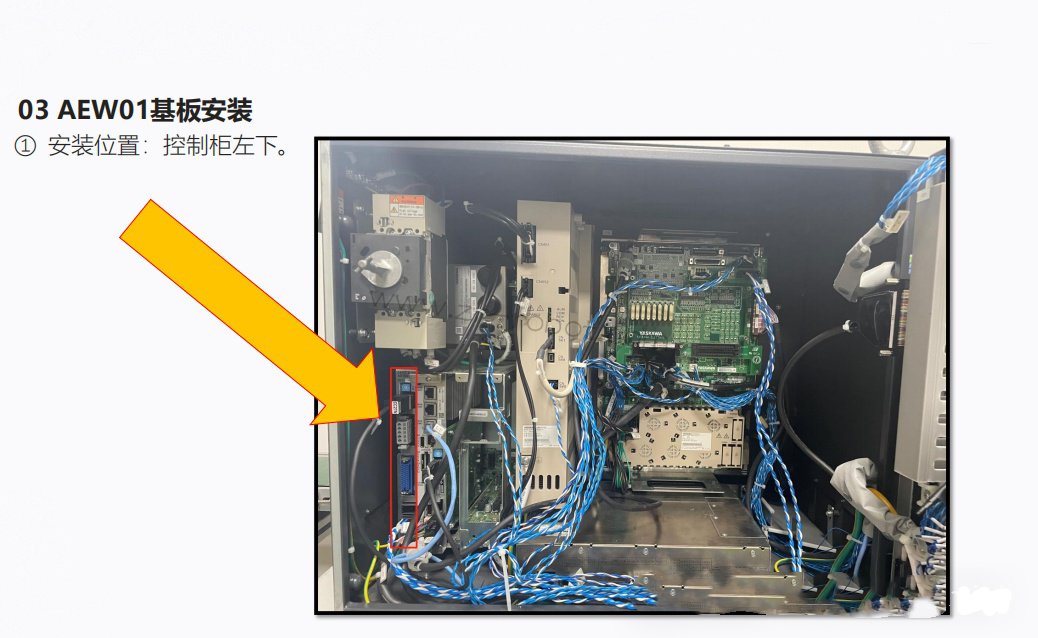
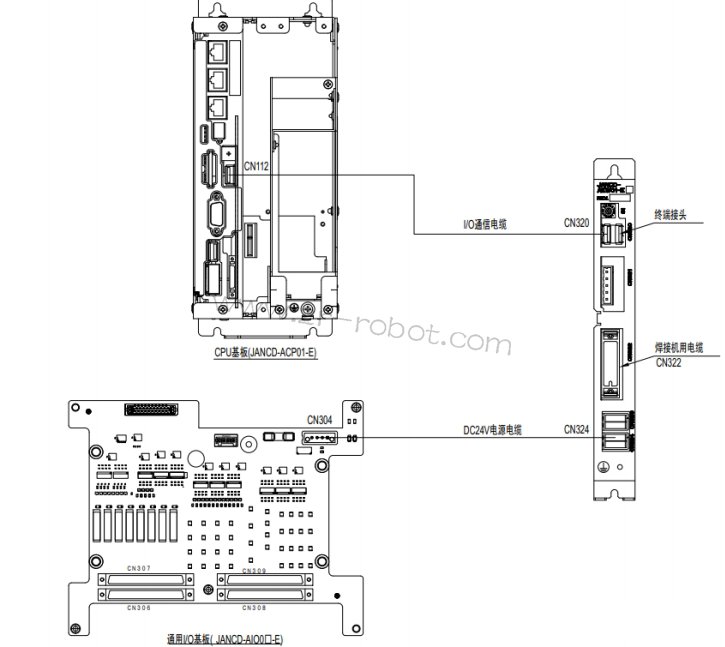
关于基板安装方式,安川机器人手臂DX200控制柜:
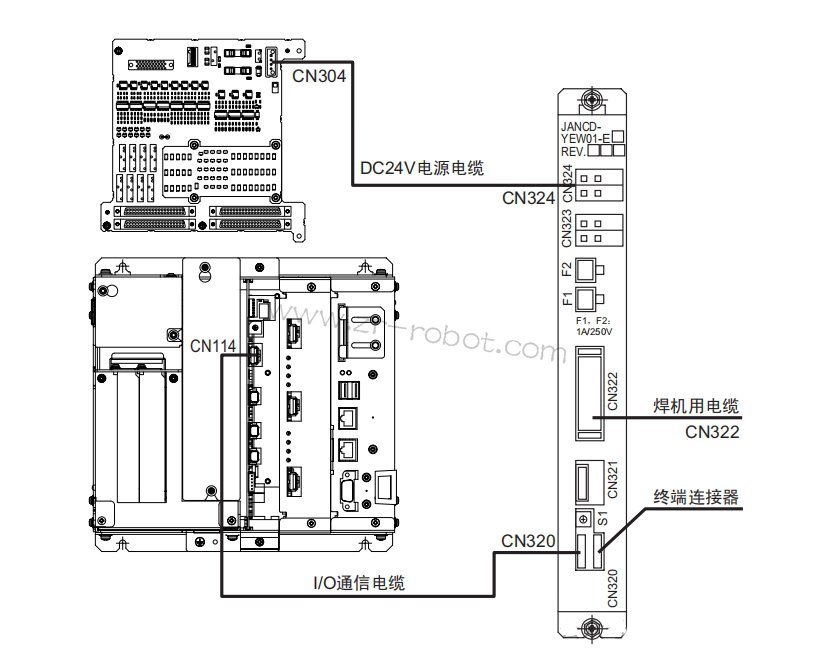
YASKAWA机械手在YRC1000控制下的安装:
安川机械手维修弧焊基板在使用过程中可能会遇到一些常见的故障现象,具体包括:
焊缝缺陷:焊缝可能出现裂纹、孔穴、未焊透以及形状缺陷等问题。其中,裂纹又可分为热裂纹和冷裂纹,其成因可能涉及母材的抗裂性能、焊接材料的质量、焊接工艺参数的选择以及焊接内应力的大小等因素。针对此类问题,通常的处理方法是在裂纹两端钻止裂孔或铲除裂纹处的焊缝金属,并进行补焊修复。
焊偏问题:焊接位置可能出现偏差,这可能是由于焊接位置设定不正确或焊枪在寻找焊接点时出现问题。应检查并调整TCP(焊枪中心点位置)的准确性。如果此类问题频繁出现,则可能需要检查机器人各轴的零位置,并重新进行校零操作。
咬边问题:焊接过程中可能出现咬边现象,这可能是由于焊接参数选择不当、焊枪角度或位置不正确等原因造成的。针对此类问题,可以适当调整焊接参数、焊枪角度或位置以改善焊接效果。
飞溅过多问题:焊接过程中飞溅物过多可能是由于焊接参数选择不当、气体组分不合适或焊丝外伸长度过长等原因造成的。可以适当调整机器功率来改变焊接参数、调节气体配比仪来调整混合气体比例或调整焊枪与工件的相对位置以减少飞溅物的产生。
系统常见故障:包括撞枪、电弧故障(不能引弧)等问题。撞枪可能是由于工件组装偏差或焊枪TCP不准确造成的,可以检查装配情况或修正焊枪TCP来解决问题。电弧故障(不能引弧)可能是由于焊丝未接触到工件或工艺参数设置过小造成的,可以手动送丝、调整焊枪与焊缝的距离或适当调节工艺参数来解决问题。保护气监控报警可能是由于冷却水或保护气供给故障造成的,可以检查冷却水或保护气管路来排除故障。
需要注意的是,具体的安川机械手维修过程可能会因故障类型和机器人型号的不同而有所差异。因此,在进行维修时,建议您联系专业的子锐机器人维修服务商以确保维修质量和安全。




