
深入理解并牢固掌握安全理念
“轨迹交叉论”这一理论深刻地指出,在复杂的系统运作中,人的不安全行为和物品的不安全状态,若在时间与空间的维度上发生交汇,便极有可能触发事故。当面对机器人这一高科技产物,进行所谓的维护时,必须持有高度的安全意识。这要求不仅要对机器人的安全设备了如指掌,更要严格遵守既定的安全操作流程,坚决杜绝任何形式的行为,即违章指挥、违章作业和违反劳动纪律。
深入探索机器人的安全设备
机器人作为现代工业的核心力量,其操作不当往往会导致严重的安全事故。为了有效降低事故发生的概率和减轻事故的危害,人们研发了多种安全设备。
- 示教盒急停按钮
- 控制柜急停按钮(该按钮能够断开伺服电源)。
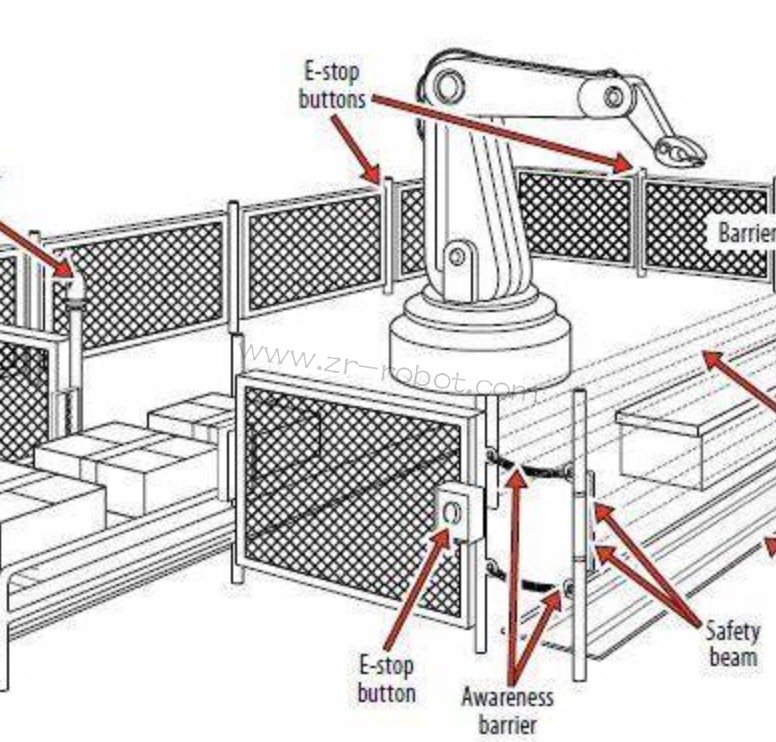
一旦这些急停按钮被按下,机器人会立即停止所有运动。机器人还接收来自外围设备(如安全光栅、安全栅栏和安全门)的外部急停输入信号,这些信号的接线端均位于机器人的控制柜内部。
再来看看模式选择开关。这个开关巧妙地安装在机器人的示教盒上,可通过它来选择机器人的运行模式。当选择某种运行模式时,相应的信息会在示教盒的液晶显示屏(LCD)上清晰显示。
关于运行模式,主要有两种:
- 操作界面有效模式和示教模式。在操作界面有效模式下,操作人员可通过示教盒的启动按钮来启动机器人程序,机器人会在安全栅栏信号有效的情况下,设定的速度运行。
- 示教模式下,程序只能通过示教盒来激活,此时机器人的运行速度被限制在250mm/s内,确保安全。
除了这些,机器人还配备了其他重要的安全设备,如安全栅栏(一种固定的防护装置)、安全门(带有互锁装置,及安全插销和插槽)等。

在更换或操作机器人前的重要注意事项
在正式操作机器人之前,必须进行一系列的安全检查。检查控制柜前门急停按钮被按下时,伺服电源灯是否处于关闭状态。这是因为在紧急情况下,如果无法使机器人停止运行,可能会导致人员受伤或设备损坏。
在操作过程中,应始终保持从正面观看机器人,并严格遵守操作步骤。要确保在紧急情况下,操作人员能够迅速撤离到安全场所。由于误操作可能引发机器人的异常动作,必须时刻保持警惕。如有任何问题或异常,要马上按控制柜或是示教器上的任意一个急停按钮。
在进行机器人示教作业前,还需仔细检查机器人动作是否异常,外部电缆遮盖物是否破损。如发现任何异常或破损,应及时进行修理或采取其他必要的安全措施。使用完示教盒后,一定要将其放回原位。如果不慎将示教盒遗落在机器人、夹具或地面上,当机器人运动时,示教盒可能会与其发生碰撞,从而引发严重的人身伤害或设备损坏事故。




