
输入与输出
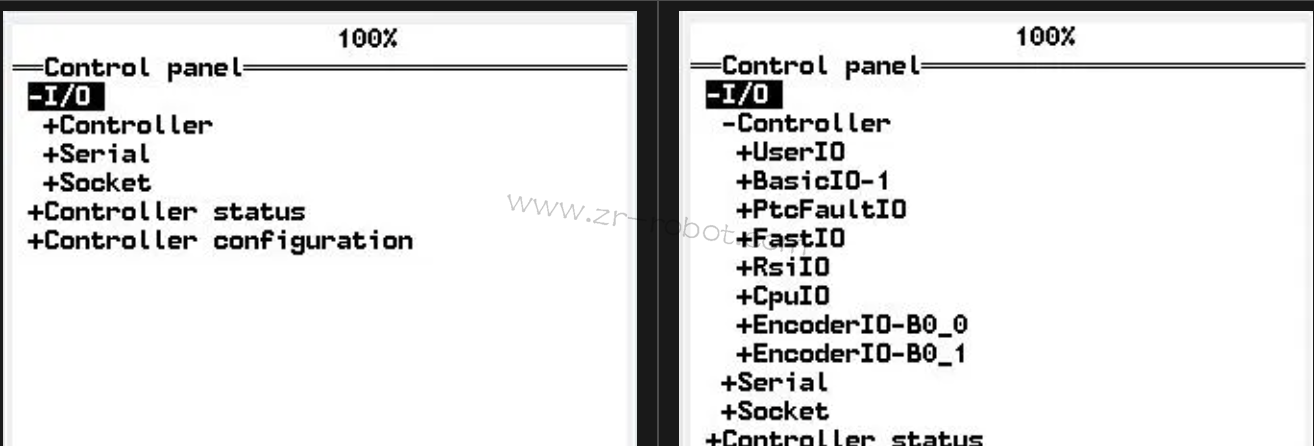
在未经任何额外配置或添加通信板卡的情况下,Staubli机械手控制器所提供的物理输入输出(I/O)资源已经相当丰富。然而,当用户需要通过配置或添加通信板卡来进一步扩展控制器的I/O资源时,史陶比尔为用户提供了Staubli Robotics Suite和Molex AppliconIO这两款专业的配置软件。通过这两款软件,用户可以轻松实现对控制器I/O资源的灵活配置与扩展。
Staubli机械手控制器状态的显示功能无需任何额外配置即可直接使用。用户只需轻轻一按导出(F8)按钮,当前的控制器状态信息(包括驱动器、编码器、RSI板等关键部件的详细信息)就会被自动导出至事件日志中。此外,这些事件日志还支持导出至U盘,方便用户进行后续的查看与分析。
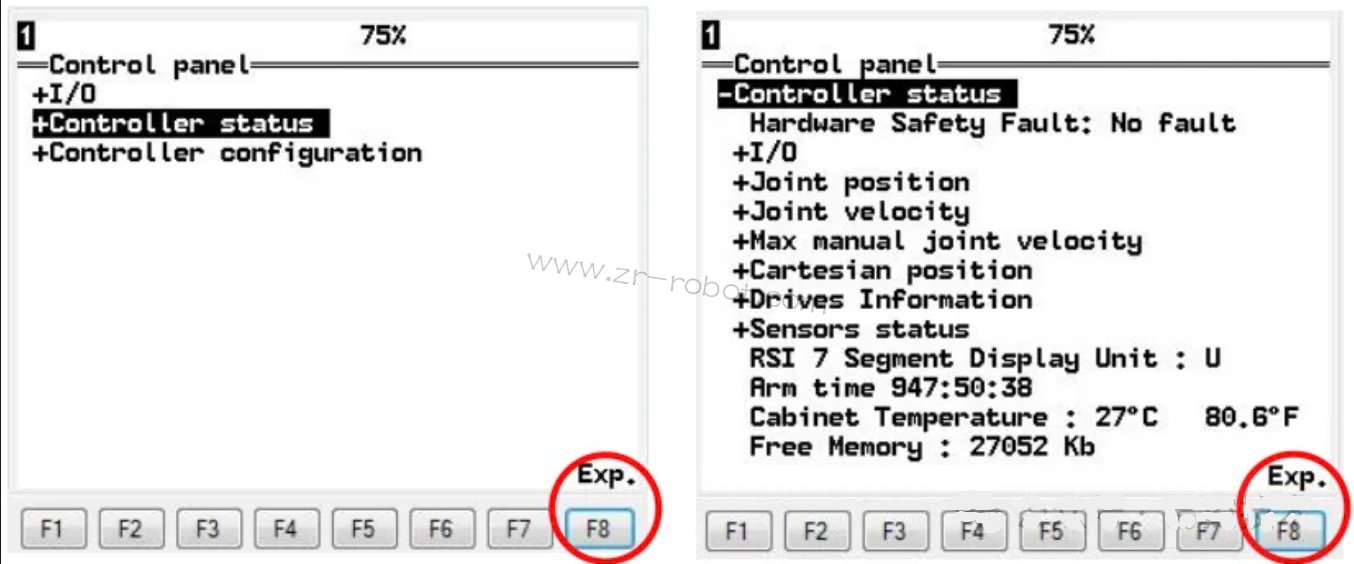
- 急停链的实时状态
- 系统I/O与示教器I/O的当前状态
- 各关节的实时位置与速度信息
- 最大允许的手动模式关节速度
- 驱动器的当前工作状态
- 编码器的实时状态
- 控制器的当前温度
- 存储器的剩余空间大小
史陶比尔TX40机器人维修指南
史陶比尔TX40机器人维修工作涉及多个方面,以下是一些常见的维修问题及相应的处理方案:
示教器维修
示教器作为史陶比尔机器人的重要操控部件,其性能的好坏直接关系到机器人的整体运行效率。常见的示教器故障包括触摸不良、无显示、显示不良(如竖线、竖带、花屏等)、按键不良、有显示但无背光、操纵杆XYZ轴不良以及急停按键失效等。针对这些故障,用户可以采取以下史陶比尔机器人TX40维修措施:
- 触摸不良或局部不灵:更换全新的触摸面板以恢复其触控功能。
- 无显示:检查并史陶比尔TX40机器人维修或更换内部主板或液晶屏以恢复显示功能。
- 显示不良:更换全新的液晶屏以消除显示异常。
- 按键不良:更换全新的按键面板以确保按键功能的正常使用。
- 有显示但无背光:更换高压板以恢复背光功能。
- 操纵杆XYZ轴不良:更换全新的操纵杆以确保操纵杆的精准操控。
- 急停按键失效:更换全新的急停按键以确保紧急停机功能的正常使用。

史陶比尔机器人主机可能出现的故障包括电源故障、初始化界面卡住以及EEPROM故障等。针对这些故障,用户可以采取以下史陶比尔机器人TX40维修措施:
- 电源故障:首先检查电源插头是否连接牢固且电源开关是否处于打开状态;若电源正常但机器人仍无法启动,则尝试重启机器人以恢复其正常工作状态。
- 初始化界面卡住:检查Staubli机械手的软件版本和配置文件是否正确无误;若仍无法解决问题,则尝试重置机器人或更新其软件版本以消除故障。




