
马头拧紧扳手控制器作业循环的全局参数
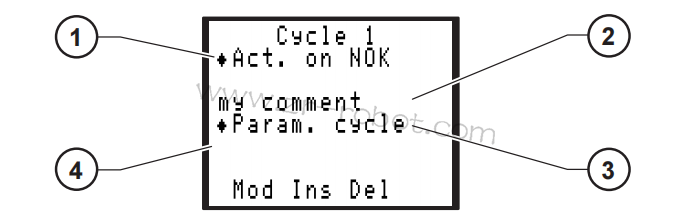
1. Action on NOK(异常结果响应动作)
2. 说明最多40个字符
3. 作业循环参数
4. 作业阶段列表
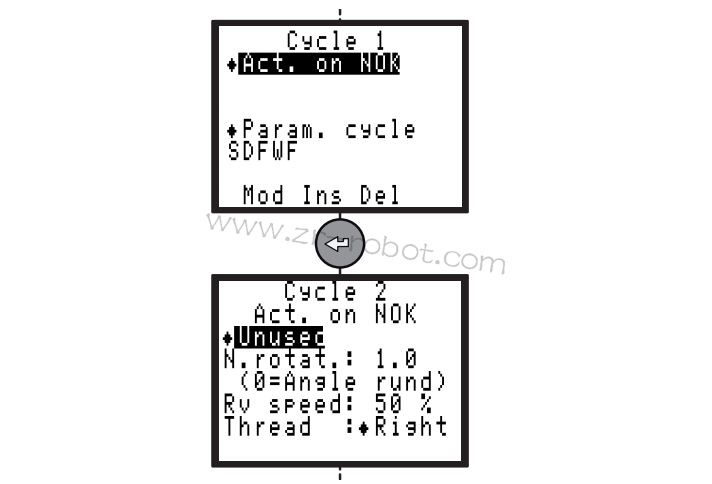
对各个作业循环的异常结果响应动作进行马头拧紧系统编程设置
在该菜单中,操作者可以启用和设置异常结果响应动作功能,使控制器能够检测拧紧作业循环中不同作业阶段的异常情况并作出响应动作。 一旦有某个作业阶段(“终值逼近”、“最终转速”、“反向转动”、“预紧扭矩”)生成“拒绝”报告,Desoutter拧紧控制器可以立即执行以下 3 种响应动作之一:
子锐机器人常见Desoutter拧紧控制器维修型号有:马头智能紧固拧紧控制器EME38-20J维修,Desoutter拧紧工具控制器CVI3 Vison维修,马头拧紧扳手控制器CVIR II 维修等。
标准模式
● 使作业循环停止在该作业阶段;
● 使作业循环停止,然后反向转动一定转数。
● 使作业循环停止,然后按照终值逼近阶段(如果有)中已经执行的转数反向转动相同转数。
ERPHT模式
● 使作业循环停止在该作业阶段
该菜单可替代插入异常结果响应动作阶段这一编程设置方式,其优点包括:
● 作业循环序列中(“终值逼近”、 “反向转动”、“最终转速”)之间没有作业阶段之间的暂停。
● 不额外增加作业阶段。
● 只需一个编程设置操作即可对Desoutter拧紧作业循环中的所有作业阶段进行监视。
只有在编程设置了作业阶段间隔时长后,已设定的异常结果响应动作才会执行,但对于终值逼近阶段除外。




