ABB 设计的系统可降低对不正确关机的灵敏度,为此,许多功能也构建进系统中。
但是, ABB 强烈建议您依照以下指示以避免伤害人员、损害设备或者造成不必要的
麻烦,以免费时费力。
关闭系统涉及许多常用操作:
1、ABB机器人应尽可能妥善放置,以免其停止后造成任何问题。
2、通过在 FlexPendant 上按 Stop 按钮来停止程序执行,如图所示。
3、关闭 Control Module 上的主开关。
4、极少需要物理关闭 Drive Module,但如果需要时,关闭 Drive Module 上的主开关。在关闭多个ABB机器人系统时,确保关闭全部 Drive Module 上的主开关。有关特定情形的具体注意事项,请参阅以下各节。
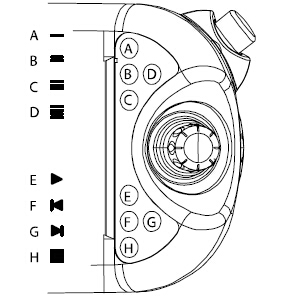
下面的图示显示 FlexPendant 停止按钮:
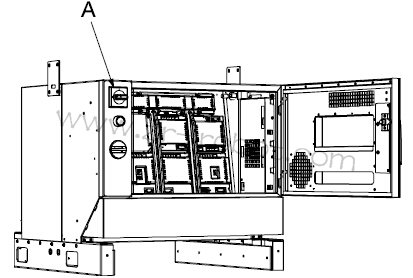
下面的图示显示 Control Module 主开关:
H STOP 按钮。 停止程序执行。
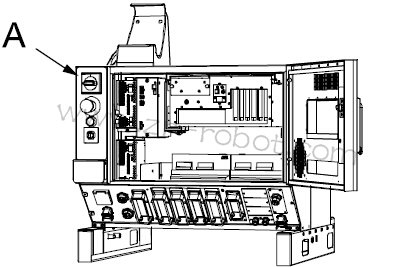
下面的图示显示 Drive Module 主开关: