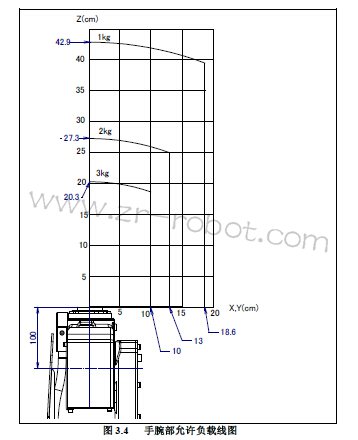
图 3.4 中示出手腕部允许负载线图。 1.负载条件应在图表所示的范围内。 2.使用时应同时符合手腕允许力矩、手腕允许惯量的条件。有关手腕允许力矩、手腕允许负载惯量,请参阅规格一览 表。 3.有关向末端执行器的安装,请参阅 4.1 节。 注意 超过允许值的使用会导致工业机器人机构部的提早损坏。请注意。